Download
1 / 18
180 likes | 290 Views
Soft Computing. Lecture 21 Review of using of NN for solving of real tasks. Autopilot airplane. LoFLYTE (Low-Observable Flight Test Experiment) is developed for NASA and USA Air Force by Accurate Automation Corp., Chattanooga, TN. Speed is 4-5 M

E N D
Soft Computing Lecture 21 Review of using of NN for solving of real tasks
Autopilot airplane • LoFLYTE (Low-Observable Flight Test Experiment)is developed for NASA and USA Air Force by Accurate Automation Corp., Chattanooga, TN. • Speed is 4-5 M • NN is learning by pilot (storing associations between situation and action of pilot) and after that may control without pilot
Project TNA • System for searching of plastic explosive in baggage in airports is developed by SAIC (Science Application International Corporation) • NN analyzes of spectrum of baggage after irradiation of it by slow neutrons • Recognition of explosive with probability 97%, speed is 10 units per minute
Using of NN on financial markets • Citibank uses NN from 1990. In 1992 yield was 25% which is large more then most of brokers • Chemical Bankuses NN (from company Neural Data) for previous processing of transactions in currency exchanges in 23 countries for detection of shady bargains • Fidelity of Bostonuses NN for control of portfolio with volume 3 billion USA, Deere & Co– 100 million USA, LBS Capital– 400 million USA • Proceedings of one seminar “AI in Wall Street” includes 6 large volumes.
Recognition of stolen credit cards • Developer is HNC Software Corp., now Fair IsaacCorporation http://www.fairisaac.com • Software Falconbased on NN • This company controls more then 220 million accounts • NN is learning to recognize unusual behavior of clients with credit card
Active reclaim in Internet • Developer is Aptex Software Inc. • Software SelectCastbased on NN • NN is learning by interesting of users and offers to client such reclaim which may be interesting for him
Control of mobile robots • LSTM for robots • Planning of path and navigation • Recognition of objects
Camera-robot coordination is function approximation • The system we focus on in this section is a work floor observed by a fixed cameras and a robot arm. The visual system must identify the target as well as determine the visual position of the end-effector.
Camera-robot coordination is function approximation (3).Two approach to use neural networks: • Usage of feed-forward networks • Indirect learning • General learning • Specialized learning • Usage of topology conserving maps
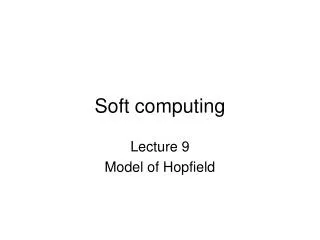
Camera-robot coordination is function approximation (4). feed-forward networks Indirect learning system for robotics. In each cycle the network is used in two different places: first in the forward step then for feeding back the error
Camera-robot coordination is function approximation (5). feed-forward networks (2)
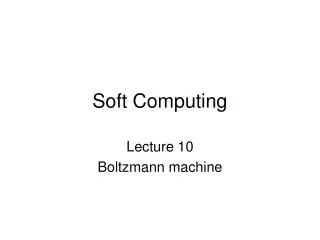
The structure of the network for the autonomous land vehicle
Diagnosis of cancer • Yulei Jiang, assistant professor of radiology at the University of Chicago • System that uses a perceptron neural network to analyze eight input nodes, converting the output node into a robability measure, which Jiang calls likelihood of malignancy. • The system is trained on a set of cases, using the leave-one-out method, which is a cross-validation technique for estimating generalization error based on resampling. A net is trained a number of times, each time leaving out one of the subsets. The omitted subset computes whatever error criterion is of interest. The system initially learns from digitized screen mammograms. • The eight input nodes represent features of calcifications, areas in breast tissue where tiny calcium deposits build up and might indicate the presence of cancer.