Download
1 / 18
190 likes | 242 Views
This presentation discusses the Spatial Pyramid Matching technique for recognizing natural scene categories, focusing on key algorithm steps like interest point descriptors extraction and SVM training. The study delves into the construction of visual word dictionaries, spatial histograms, and intersection kernels to enhance scene recognition accuracy. A case study on Butterfly Classification using a dataset by Lazebnik, Schmid, and Ponce is presented, demonstrating the effectiveness of Spatial Pyramid techniques on varied features. The experiment showcases the impact of different spatial pyramid levels, showing improved results with increasing pyramid levels.

E N D
Beyond Bags of Features: Spatial Pyramid Matching for Recognizing Natural Scene Categories Svetlana Lazebnik, Cordelia Schmid, Jean Ponce Presented by: Lubomir Bourdev Many of the slides by: Svetlana Lazebnik
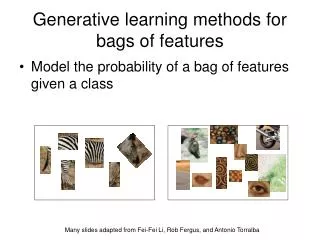
Key Idea • Pyramid Match Kernel (Grauman & Darrell) Pyramid in feature space, ignore location • Spatial Pyramid (this work) Pyramid in image space, quantize features
Algorithm • Extract interest point descriptors (dense scan) • Construct visual word dictionary • Build spatial histograms • Create intersection kernels • Train an SVM
Algorithm • Extract interest point descriptors (dense scan) • Construct visual word dictionary • Build spatial histograms • Create intersection kernels • Train an SVM OR Weak (edge orientations) Strong (SIFT)
Algorithm • Extract interest point descriptors (dense scan) • Construct visual word dictionary • Build spatial histograms • Create intersection kernels • Train an SVM • Vector quantization • Usually K-means clustering • Vocabulary size (16 to 400)
Algorithm • Extract interest point descriptors (dense scan) • Construct visual word dictionary • Build spatial histograms • Create intersection kernels • Train an SVM
Algorithm • Extract interest point descriptors (dense scan) • Construct visual word dictionary • Build spatial histograms • Create intersection kernels • Train an SVM
Algorithm • Extract interest point descriptors (dense scan) • Construct visual word dictionary • Build spatial histograms • Create intersection kernels • Train an SVM
My experiment: Butterfly Classification Peacock Zebra
Butterflies • Dataset from Lazebnik / Schmid / Ponce 70 train / 64 test 50 train / 41 test • Images centered on the butterfly • Significant background clutter • Large pose/viewpoint variations • Scale variations: up to x4
Butterfly Results Spatial pyramid levels: 1 (No pyramid) Spatial pyramid levels: 4