Download
1 / 25
270 likes | 454 Views
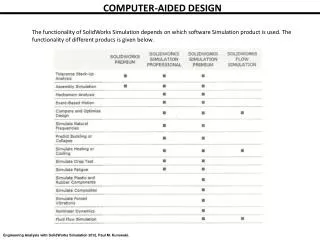
Asparagus Computer Vision Aided Detection. By Ryan Moore & Gerti Tuzi. Project Objective and Application. To design a system which can determine the physical location of individual asparagus in a farming environment, through the use of Computer Vision methods.

E N D
Asparagus Computer Vision Aided Detection By Ryan Moore & GertiTuzi
Project Objective and Application • To design a system which can determine the physical location of individual asparagus in a farming environment, through the use of Computer Vision methods. • Implemented in a moving asparagus-picking machine. • Determination of correct asparagus: • Physical Location • Physical Height • Operated during day and night time.
Simplified System Overview Detection and Image Coordinate Determination Moving Asparagus Picking Machine Digital To Physical Coordinate Conversion
Physical Systematic Characteristics • Single out only the asparagus in the field using directed light. • Marking the asparagus allows identification • Directed light must be more intense than background • Higher light intensity must be able to be detected during day and night time. • Predetermined-angle light source. • Allows determination of objects at varying distances from machine. • Minimum height detection is predetermined.
Digital Systematic Characteristics • Perceive the reflection of the directed light on the asparagus into the digital image. • Minimize background noise (light) interference. • Use short digital camera exposure times. • To be able to extract and detect the asparagus object (Light Source Mark) in the digital image. • Remove background noise. • Determine objects and return digital image object coordinates • Additional Characteristics • To account for object detection under motion.
Combining Physical and DigitalNecessary Steps • Determine geometrical setup. • Establish relationship between physical location/height and digital image coordinates. • Mark asparagus with directed light. • Perceive light markers, while minimizing noise • Detect light marker and return digital image coordinates. • Translate digital image coordinates into physical world coordinates.
Geometrical Setup and Digital Image DataSimplified Example Geometrical Setup Data Extraction – Object Labels
Location DeterminationWorld vs. Digital Image Relation Marker Height Equation (Best Fit Line) World Distance Equation (Best Fit Line) • Data extracted from digital images were plotted against respective world measurements. • Strong relationship between digital and world measurements • Prediction test were run successfully. Average prediction errors were : 3% and 3.5% for base distance and marker height respectively
Object Detection • Upon reception of digital image, positive objects (physical light marker) must be detected. • Steps necessary: • Background vs. Foreground Differentiation • Morphological Transformation, Background Removal, Binary Thresholding, Blob Size restriction • Object Detection. • Blob Detection • Image Digital Coordinate Determination of Positive Objects • Collect and return blob coordinates .
Object DetectionStatistical Method • Designing a system which integrates image processing and object detection. • Image processing was based on the use statistical analysis of available data. • Determine positive object light intensity vs. overall image. • Averages, Standard Deviation • Determine Optimal Binary Thresholds • Use Normalized Image Energy to identify optimal (predetermined) binary threshold
Experiment SetupTesting the Statistical Approach LEDs were used to represent the light marker on the asparagus. Varying distance to emulate motion. Controlled background lighting to reduce errors and determine the performance of the approach
Statistical ApproachExperiment Example Detected Objects inside red Squares Raw Camera Feed • High Recognition Rate • Object is a light source. • Much higher intensity than background. • Very low false alarm rate
Otsu’s Threshold Method • Find’s the threshold based on the intensity distribution of a grayscale images. • Helps adjust to account for lighting changes in the environment. • Reduces the overlapping of the foreground and background regions. • The algorithm is quick for large images.
Binary Morphology • Binary morphology has 4 fundamental tools, namely, erosion, dilation, opening, and closing. • Each tool requires a structuring element. • The structuring element will determine what gets removed and what remains. • The goal is the have the structuring element match the desired shape and remove it. • Performing subtraction will give us the desired object.
Morphology and Otsu ApproachExperiment Setup Black Background to minimize noise Controlled Lighting to determine the performance and behavior of approach. Varying distance to emulate motion
Morphology and Otsu ApproachExperiment Example Raw Camera Feed Detected Objects • Recognition Rate is high • False Hits Rate is also high. • There is still lots of background noise. • This noise should be reduce by using the IR camera.
Morphology and Otsu’s MethodFunctional Description: Blob Size Hit Rate as a function of Blob Size Missed Rate as a function of Blob Size
Strobe Light • Control Methods • Use a PIC microcontroller for the external trigger • Software Trigger • External circuit is used to create large current spikes during the strobe period to produce high intensities. • Maximum current that can be used is 10A at 1% Duty Cycle and 500mA at DC.