Download

1 / 42
420 likes | 444 Views
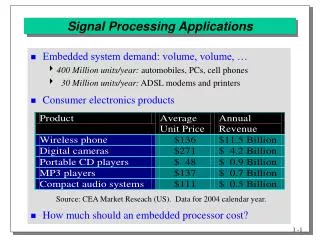
Explore cutting-edge methods for polyphase signal parameter estimation, including hybrid approaches, phase differentiation, and genetic algorithms. Dive into research directions, applications, and advancements. Discover the intricacies of non-uniform signal sampling, refining parameter estimates, and more.

E N D
University of DonjaGorica Signal processing and applications Marko Simeunović, PhD
Outline • Problems in the PPS estimation • Improved PD-based PPS estimators • 2D PPS estimators • Non-uniform signal sampling and impulsive noise • Refining PPS parameter estimates • The QML approach • Applications
Signal model • The PPS model can be described as: s(n) – Pth order PPS ai – phase parameters A – amplitude v(n) – zero-mean white Gaussian noise • The goal is to estimate parameters of s(n) from noisy observationsx(n).
Maximum-likelihood estimation • The maximum-likelihood estimation is done by performing P-dimensional search: • The amplitude and initial phase are estimated after dechirping of higher-order phase parameters. • Pros: • high accuracy close to the CRLB; • low SNR threshold. • Cons: • P-dimensional search; • limitation to lower order PPSs.
Phase differentiation • The phase differentiation (PD) based approach is proposed for reducing estimation complexity: where and are lag parameters. • High-order ambiguity function (HAF) is defined as: • HAF peaks at:
HAF and PHAF • The HAF has following issues: • number of noisy and interference terms increases as P does; • high SNR threshold for relatively low order PPSs; • error propagation; • problem with cross-terms for multi-component signals. • Product HAF (PHAF) is solution for multi-component PPS:
CPF • The cubic phase function (CPF) is proposed for the estimation of cubic phase signals (P=3): • The CPF reaches maximum at the second order phase derivative. • CPF pros with respect to the HAF: • 6dB lower SNR threshold; • reduced effect of the error propagation. • Cons: • it can only estimate cubic phase signals; • fast realization.
Our research directions • The general conclusion is: A compromise between calculation complexity and accuracy has to be made • Our research directions: • reducing number of auto-correlations, i.e. the order of the PD operator; • search optimization in procedure for locating peak of estimator function; • parameter refinement procedures; • parameter estimation in impulsive noise and missing sample case; • estimation of multi-dimensional signals; • applications of PPS estimators.
Hybrid CPF-HAF approach • The HAF/PHAF performance can be improved by reducing number of PDs and modification of the auto-correlation function. • The hybrid CPF-HAF (HCPF-HAF)approach can be described as: • HCPF-HAF vs HAF: • lower number of noise and interference terms; • for 9dB lower SNR threshold; • reduced error propagation effect.
Product HCPF-HAF approach • The product HCPF-HAF is introduced for the estimation of multi-component PPSs: performance of mono-component PPS
HO-CPF-WD approach • The HO-CPF-WD approach is proposed for the estimation of higher-order PPSs. • It consists of three steps procedure: • Step 1: estimation of odd order phase parameters: • Step 2: estimation of even order phase parameters: • Step 3: estimation of initial phase and amplitude.
Genetic algorithm • Efficient maximization of the HO-CPF-WD and ML approach is challenged task. • Problem: Large numbers of local optima that increases as P does. • Solution: Search optimization using genetic algorithm.
GA setup Problem: in 1% of cases divergence occurs. • Solution:divergence detection • ifOf≥εME GA convergence, • if Of<εMEGA divergence. Divergence occurs – rerun the algorithm. • Pros: • reduced complexity with respect to the direct search; • real-time estimation of PPSs up to 10th order.
Non-uniform sampled CPF • Two reasons for realization of the CPF using the FT: • reducing the estimation complexity; • applying advanced techniques for search optimization. • The non-uniform sampled CPF (NU-CPF) is defined as: • Peak position: second-order phase derivative. • Complexity: same as for the HAF. • Interpolation is used for the determination of signal samples at non-integer time instants.
2D PPS • 2D PPS can be described as • The PD operator defined for 2D PPS is of the following form: • It consists of phase differentiations along n and m coordinates.
2D PPS estimators • The 2D versions of PD-based estimators are given in the following: • 2D HAF (FFM): • 2D PHAF: • 2D CPF:
HOCPF-WD with nonuniform sampled PPS • In our research, we considered scenario wheresignal is nonuniformly sampled at time instants tk, where total number of samples K is below that required by the sampling theorem, i.e. K≤N. • Two cases are considered: • Case 1:signal is symmetrically sampled with respect to t=0, i.e. tk=-tK-k-1; • Case 2: signal sampling is not symmetric with respect to t=0. • Solution for Case 1: since pairs x(tk) and x(tK-k-1) are known, the HOCPF-WD is calculated for available samples:
HOCPF-WD with nonuniform sampled PPS • Solution for Case 2: interpolation of missing samples from the pairs x(tk) and x(tK-k-1). • Interpolation steps: • Step 1: Interpolation by the DFT with factor F=4 or F=8 to obtain signal . • Step 2: Calculation of missing sample by linear interpolation using two closest samples from the refined grid, and
Missing samples case • Assume that sampling recordings can be described as (NM – position of missing samples): • Interpolation in auto-correlation domain is more convenient that interpolation in FT domain since higher-order PPS is more concentrated. • Interpolated auto-correlation function: • is evaluated from using interpolation in time-lag domain – Matlab interp1 function. • is now used in the PD operator as 1st order PD.
Mixed Gaussian and impulsive noise • The impulsive noise should be recognized and samples corrupted by impulses should be eliminated from the signal and treated as missing ones. • Recognition of samples corrupted by impulsive noise can be performed using hard thresholding as • Threshold is chosen based on assumed percentage of sampled corrupted by impulsive nose: • Optimal threshold can be selected performing PPS estimation for various percentages q∈Q and choosing optimal one by maximization of the cost function (ML).
Parameter refinemet • Due to errors in the estimation process signal after dechir-ping is still Pth order PPS • The O’Shea based refinement estimates errors made in coarse estimation pushing estimation MSE to the CRLB. • The O’Shea approach consists of the following steps: • Step 1: Signal filtering by moving average filter • Step 2: Phase unwrapping
Parameter refinemet • Step 3: Polynomial regression • The O’Shea refinement is generalized to both multi-component and multi-dimensional PPSs.
QML algorithm • PPS estimators are generally unbiased and nonlinear. • Biased estimators coupled by O’Shea refinement is able to handle high-order PPS. • The QML algorithm can be described using following steps: • Step 1: Calculate the STFT for various window widths h • Step 2: Estimate IFs from the STFT • Step 3: Coarse parameter estimation using polynomial interpolation • Step 4: Parameter refinement using O’Shea approach to obtain .
QML algorithm • Step 5: Select optimal estimates by maximizing the criteria function • The QML algorithm can be used also for: • PPS when P is not known in advance; • for signals with non-polynomial modulation. • The QML algorithm is extended to: • 2D PPSs; • multi-component PPS; • compound/combined models; • aliased signals.
QML in action Hybrid sinusoidal FM + PPS 7th order PPS
QML in action 6th order PPS – aliased signal
Applications - sonars • In sonars, signal received by themth sensor can be modeled as • whereddistance between sensors, cspeed of lighti θdirection of arrival. • Parameters of this signal can be estimated from the PD • Estimation ofaP i ψ:from FT-a with respect tonandm, respectively. sinusoid with respect tom sinusoid with respect ton
Applications - radars • Radars return can be modeled as • 2D DFT is standard radar image. • Ideal radar image – FT of the first-order 2D PPS signal. • Focusing: estimation and dechirping of higher order PPS parameters.









![[Unix Programming] Signal and Signal Processing](https://cdn3.slideserve.com/5708599/unix-programming-signal-and-signal-processing-dt.jpg)