Download
1 / 66
670 likes | 870 Views
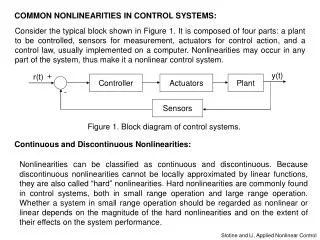
Handling the Saturation Nonlinearities. Zongli Lin University of Virginia. Saturation Nonlinearities. Magnetic bearing input output characteristic:. Standard saturation function:. Saturation in AMB Systems. ISO 14839: Vibration of Rotating Machinery Equipped with Active Magnetic Bearings.

E N D
Handling the Saturation Nonlinearities Zongli Lin University of Virginia
Saturation Nonlinearities Magnetic bearing input output characteristic: Standard saturation function:
Saturation in AMB Systems ISO 14839: Vibration of Rotating Machinery Equipped with Active Magnetic Bearings C.1 General No threshold limits are given because the tolerated level of saturation depends on the application, control system design and the reason for saturation. C.3 High-frequency disturbance saturating the amplifier It should be noted that a well-designed AMB system tolerates a relatively high level of saturation before rotor dynamic instability occurs.
Saturation in AMB Systems C.4 Rotor dynamic instability [disturbances lead to amplifier saturation, which] causes the rotor dynamic behavior to deteriorate and, in the worst case, can even lead to instability of some other vibration modes. The risk of such a situation is eliminated by a proper control system design. C.5 Large-amplitude instability [When perturbed by large-amplitude disturbances,] the system does not recover but starts oscillating…(how large is large? To a large degree, depends on control design) C.6 Critical speed passing Passing of a bending critical speed can lead o voltage saturation… Even a low level of saturation in this case can lead to rapidly increasing whirling amplitude.
Saturation in AMB Systems Observations: • Saturation nonlinearity is important and has to be considered. • How much negative effect of the saturation a proper control design can • overcome is not well-understood yet. • Measurement of performances needs to be developed. • Proper control design is crucial.
(u) u Control Systems with Actuator Saturation • Control Problems: • Stabilization (large domain of attraction, fast • convergence rate) • Disturbance rejection (bounded energy • disturbances, persistent disturbances, fixed • frequency disturbances) • Robustness to plant and actuator uncertainties • Analysis Problems (for a given control design): • Estimation of the size of domain of attraction, convergence rate • Estimation of disturbance rejection capability • Estimation of tolerance to plant and actuator uncertainties
Controllability with Bounded Controls Null controllable region : Example: • shrinks as increases and expands otherwise • is bounded and open
Controllability with Bounded Controls Example: Example:
Assume that is controllable a) If is semi-stable (), then, b) If is anti-stable (), then, is a bounded convex open set Controllability with Bounded Controls General characterization of [Hsu, PhD Dissertation ‘76] c) If then, where is the null controllable region of
Controllability with Bounded Controls Characterization of for anti-stable systems [Hu-Lin-Qiu, SCL ‘02] Example (a 2nd order system):
Controllability with Bounded Controls Example (a 3rd order system):
(u) u Stabilizability and Design Techniques • Stabilizability A basic control problem: stabilization • Global stabilization • Semi-global stabilization • Regional stabilization • Local stabilization Questions of interest: • Stabilizability • Type of feedback laws • Robustness
Stabilizability and Design Techniques • Global stabilizability Example: Proof.
Stabilizability and Design Techniques • Global stabilizability Example: Proof.
is asymptotically null controllable with bounded • controls (ANCBC) [Sussmann-Sontag-Yang, CDC ‘90] • in general, nonlinear feedback laws are needed • [Fuller, IJC ’76; Sussann-Yang, CDC ‘91] • nonlinear, but smooth, stabilizers • [Sussmann-Sontag-Yang, Teel, Megretski, Lin,···, ‘90s] Stabilizability and Design Techniques • Global stabilizability Some fundamental results:
Stabilizability and Design Techniques • Nested saturation design for global stabilization [Teel, SCL ’92; Sussmann-Sontag-Yang, TAC ‘94]
Stabilizability and Design Techniques • Semi-global stabilization and low gain feedback ARE based low gain feedback [Lin-Stoorvogel-Saberi, Automatica ’96] In the absence of :
0 Stabilizability and Design Techniques • Semi-global stabilization and low gain feedback Semi-global stabilization: For any bounded 0, there exists an , small enough, such that
Stabilizability and Design Techniques • Semi-global stabilization and low gain feedback Low gain feedback via eigenstructure assignment • Chain of integrator case: Low gain feedback:
Stabilizability and Design Techniques • Semi-global stabilization and low gain feedback In the absence of :
Stabilizability and Design Techniques • Semi-global stabilization and low gain feedback Semi-global stabilization: 0
Stabilizability and Design Techniques • Globalization of low gain feedback Recall: Semi-global stabilization Question: Global stabilization?? Answer [Megretski, IFAC Congress, ’96]:
Stabilizability and Design Techniques • Low-and-high gain feedback Basic idea:
Stabilizability and Design Techniques • Low-and-high gain feedback Low-and-high gain feedback: Closed-loop system:
Stabilizability and Design Techniques • Low-and-high gain feedback Example[Lin-Saberi, IJRNC ’95]:
Stabilizability and Design Techniques • Low-and-high gain feedback Application: practical stabilization
Stabilizability and Design Techniques • Low-and-high gain feedback Example [Lin-Saberi, IJRNC ’95]:
Stabilizability and Design Techniques • Low-and-high gain feedback Application: almost disturbance decoupling
Stabilizability and Design Techniques • Low-and-high gain feedback Scheduled low-and-high gain feedback:
Stabilizability and Design Techniques • Low-and-high gain feedback
Stabilizability and Design Techniques • Exponentially unstable systems Example: Semi-global stabilization on : To construct feedback gain F such that For 2nd order anti-stable systems [Hu-Lin-Qiu, IEEE TAC ‘99] Step 1. Let P > 0be such that Step 2. Let for k =0.50005, 0.65, 1, 3
Stabilizability and Design Techniques • Exponentially unstable systems In general, nonlinear feedback is needed [Hu-Lin, IEEE TAC ‘03] Semi-global stabilization on by nonlinear feedback [Hu-Lin, SCL ‘01]
Output Regulation: Disturbances with Known Frequencies [Hu-Lin, IEEE TAC ‘04] x e w u Controller
Output Regulation: Disturbances with Known Frequencies Regulatable region & asymptotically regulatable region • Characterization of • Construction of feedback laws
Output Regulation: Disturbances with Known Frequencies
Output Regulation: Disturbances with Known Frequencies
LMI Approach to Analysis and Design • Objectives: • Estimation of the domain of attraction; • Design of for large domain of attraction. A set invariance condition [Hu-Lin-Chen, Automatica ’99] LMI optimization problems!!!
LMI Approach to Analysis and Design Example [Pittet et. Al, CDC ’97] Based on circle criterion Based on Popov criterion
LMI Approach to Analysis and Design The constraints:
LMI Approach to Analysis and Design Tools: Hu & Lin, Control Systems with Actuator Saturation, Birkhäuser, 2001. A linear system with input and state constraints: Design objectives: • Large stability region inside Xc; • Good transient response; • Disturbance rejection.
LMI Approach to Analysis and Design Design a feedback law which produces an invariant ellipsoid e (P) ⊂ Xc, such that it contains axi, i=1,2,…,N, with a maximized. The optimization problem is,
LMI Approach to Analysis and Design Good transient performance High convergence rate The problem of maximizing the convergence rate with a guaranteed stability region S can be formulated as: This can be solved with LMI.
LMI Approach to Analysis and Design For Ib=0.1A For Ib=0.5A
Robustness w.r.t. Actuator Nonlinearity Motivation: sat(u) u Realistic actuator input output characteristics (magnetic bearing) Idealized actuator input output characteristics
Robustness w.r.t. Actuator Nonlinearity Absolute stability u v The function satisfies a sector condition: Absolute stability:the origin is globally uniformly asymptotically stable for any nonlinearity in the sector.
Robustness w.r.t. Actuator Nonlinearity Absolute stability Circle criterionis a sufficient condition for quadratic stability: there exists a P > 0 such that, with i.e., the ellipsoid is contractively invariant for every > 0 . Quadratic stabilityLMIs Vertex criterion:The system is quadratically stable iff there exists a P > 0 such that Less conservative than the circle criterion.