Download
1 / 10
100 likes | 219 Views
Theorem:. (1) (P) has a finite optimal solution. (D) has a finite optimal solution. (2) (P) has unbounded solutions. (D) has no feasible solution. (3) (P) has no feasible solution. Either (D) has no feasible solution or (D) has unbounded solutions. Proof:.

E N D
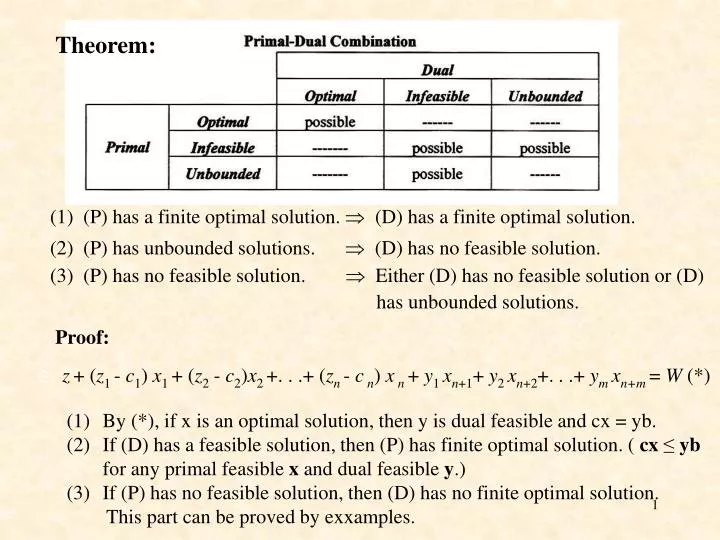
Theorem: (1) (P) has a finite optimal solution. (D) has a finite optimal solution. (2) (P) has unbounded solutions. (D) has no feasible solution. (3) (P) has no feasible solution. Either (D) has no feasible solution or (D) has unbounded solutions. Proof: • z+ (z1 - c1) x1 + (z2 - c2)x2 +. . .+ (zn - c n) x n+y1 xn+1+ y2 xn+2+. . .+ ym xn+m = W (*) • By (*), if x is an optimal solution, then y is dual feasible and cx = yb. • If (D) has a feasible solution, then (P) has finite optimal solution. ( cx≤ yb for any primal feasible x and dual feasible y.) • If (P) has no feasible solution, then (D) has no finite optimal solution. • This part can be proved by exxamples.
Farka’s Theorem has been used extensively in the derivation of optimality condition of linear and nonlinear programming problems. It is braodly known as Theorem of alternative.
primal slackness vector dual slackness vector
For any primal feasible solution x and dual feasible solution w, we have rTx + sTw is equal to the duality gap between the primal feasible solution x and dual feasible solution w. The duality gap vanishes, if and only if rTx = 0 and sTw = 0. (4.16)
useful tool for verifing whether a certain point is optimal. Karash-Kuhn-Tucker condition 1. Goal identification (K-K-T condition) 2. Control the search process (a) A good direction of movement. (b) An appropriate step length along the good direction.
Karush-Kuhn-Tucker Condition for Nonlinear Programming Problems (1) Max f (x), x = (x1 , x2 , . . . , xn), s.t. - < xj < + Necessary Condition for Optimality (Necessary and sufficient conditions hold if f(x) is a concave function of x.) (2) Max f (x), x = (x1 , x2 , . . . , xn), s.t. xj 0 Necessary Condition for Optimality (Necessary and sufficient conditions hold if f(x) is a concave function of x.)
(3) Max f(x), x = (x1 , x2 , . . . , xn), s.t. gi(x) bi, i = 1, 2, . . . , m,xj 0 Necessary Condition for Optimality: We may derive the above condition by considering L(x, u) as an unconstrained problem as that in (2). (Necessary and sufficient conditions hold if f(x) is a concave function of x and gi(x), i=1, . . . , m are convex functions of x.) x = (x1 , x2 , . . . , xn ), u = ( u1 , u2 , . . . , um),