Download
1 / 1
30 likes | 147 Views
An Information Fusion Approach for Multiview Feature Tracking Esra Ataer-Cansizoglu (ataer@ece.neu.edu) and Margrit Betke (betke@cs.bu .edu ) Image and Video Computing Group, Computer Science Department, Boston University. Experiments & Results. Introduction. DATASET

E N D
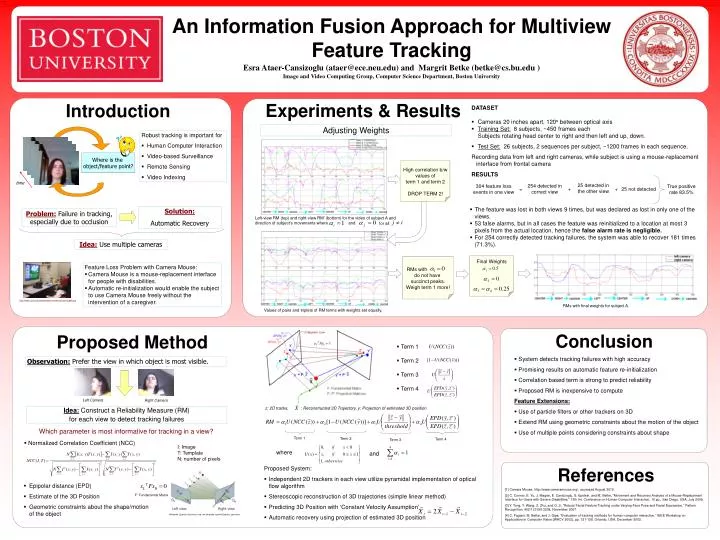
An Information Fusion Approach for Multiview Feature TrackingEsra Ataer-Cansizoglu (ataer@ece.neu.edu) and Margrit Betke (betke@cs.bu.edu)Image and Video Computing Group, Computer Science Department, Boston University Experiments & Results Introduction • DATASET • Cameras 20 inches apart, 120o between optical axis • Training Set: 8 subjects, ~450 frames each • Subjects rotating head center to right and then left and up, down. • Test Set: 26 subjects, 2 sequences per subject, ~1200 frames in each sequence. • Recording data from left and right cameras, while subject is using a mouse-replacement interface from frontal camera • RESULTS Final Weights Adjusting Weights • Robust tracking is important for • Human Computer Interaction • Video-based Surveillance • Remote Sensing • Video Indexing Where is the object/feature point? High correlation b/w values of term 1 and term 2 DROP TERM 2! time 25 detected in the other view 254 detected in correct view 304 feature loss events in one view True positive rate 83.5% = + 25 not detected + • The feature was lost in both views 9 times, but was declared as lost in only one of the views. • 53 false alarms, but in all cases the feature was reinitialized to a location at most 3 pixels from the actual location, hence the false alarm rate is negligible. • For 254 correctly detected tracking failures, the system was able to recover 181 times (71.3%). Solution: Automatic Recovery Problem: Failure in tracking, especially due to occlusion and for all Left-view RM (top) and right-view RM’ (bottom) for the video of subject A and direction of subject’s movements where Idea: Use multiple cameras RMs with do not have succinct peaks. Weigh term 1 more! • Feature Loss Problem with Camera Mouse: • Camera Mouse is a mouse-replacement interface for people with disabilities. • Automatic re-initialization would enable the subject to use Camera Mouse freely without the intervention of a caregiver. http://www.cs.bu.edu/faculty/betke/research/jordan-bubble.jpg RMs with final weights for subject A. Values of pairs and triplets of RM terms with weights set equally. Conclusion Proposed Method • Term 1 • Term 2 • Term 3 • Term 4 • System detects tracking failures with high accuracy • Promising results on automatic feature re-initialization • Correlation based term is strong to predict reliability • Proposed RM is inexpensive to compute Feature Extensions: • Use of particle filters or other trackers on 3D • Extend RM using geometric constraints about the motion of the object • Use of multiple points considering constraints about shape Observation: Prefer the view in which object is most visible. Left Camera Right Camera z: 2D tracks, : Reconstructed 3D Trajectory, y: Projection of estimated 3D position Idea: Construct a Reliability Measure (RM) for each view to detect tracking failures Which parameter is most informative for tracking in a view? Term 1 Term 2 Term 4 Term 3 • Normalized Correlation Coefficient (NCC) • I: Image • T: Template • N: number of pixels where and References • Proposed System: • Independent 2D trackers in each view utilize pyramidal implementation of optical flow algorithm • Stereoscopic reconstruction of 3D trajectories (simple linear method) • Predicting 3D Position with ‘Constant Velocity Assumption’ • Automatic recovery using projection of estimated 3D position • Epipolar distance (EPD) • Estimate of the 3D Position • Geometric constraints about the shape/motion of the object [1] Camera Mouse, http://www.cameramouse.org/, accessed August 2010. [2] C. Connor, E. Yu, J. Magee, E. Cansizoglu, S. Epstein, and M. Betke, "Movement and Recovery Analysis of a Mouse-Replacement Interface for Users with Severe Disabilities," 13th Int. Conference on Human-Computer Interaction, 10 pp., San Diego, USA, July 2009. [3] Y. Tong, Y. Wang, Z. Zhu, and Q. Ji, “Robust Facial Feature Tracking under Varying Face Pose and Facial Expression,” Pattern Recognition, 40(11):3195-3208, November 2007. [4] C. Fagiani, M. Betke, and J. Gips, “Evaluation of tracking methods for human-computer interaction,” IEEE Workshop on Applications in Computer Vision (WACV 2002), pp. 121-126, Orlando, USA, December 2002. F: Fundamental Matrix Wikipedia, Epipolar Geometry, http://en.wikipedia.org/wiki/Epipolar_geometry






