Download

1 / 16
160 likes | 284 Views
Israeli Universal Spacecraft Bus Characteristics and Design Trade-Offs. June 2010. The IMPS* Bus. *IMPS = IAI Multi Purpose Satellite. Used by TECSAR & Ven μ s satellites. Onboard processor: Intel 486 / LEON-3 Power Supply: 800W Bus Power Consumption: 250W Battery Capacity: 30/45 Ah

E N D
Israeli Universal Spacecraft Bus Characteristics and Design Trade-Offs June 2010
The IMPS* Bus *IMPS = IAI Multi Purpose Satellite Used by TECSAR & Venμs satellites. Onboard processor: Intel 486 / LEON-3 Power Supply: 800W Bus Power Consumption: 250W Battery Capacity: 30/45 Ah Bus Dry Mass: 190 Kg Payload Mass: ≤150 Kg
IMPS AOCS* system • Sensors: • 2 sun-sensors. • 2 magneto-meters. • MEMS coarse rate gyro. • GPS Receiver. • 2 Star Trackers. • Actuators: • 4 reaction wheels (1 spare). • 2 X 3-axis magento-torquers • 2 X 4 X 5N Hydrazine Thrusters • Propulsion System for orbit control (Four Alternatives): • 2 Hydrazine Thrusters (25N) • Hall Effect Thruster (0.1N) • Both • None *AOCS = Attitude & Orbit Control System
Design Trade Offs • AOCS system – Accuracy • Propulsion system – Orbit Accuracy • Data Storage – Volume • Communication – Bandwidth • Power System – Mission Requirements
Attitude Determination • Star Tracker • Accuracy: 10-3 deg • Unit Price: 0.5M$ • One is required, two for redundancy • Engineering – Heritage from many missions • Earth Horizon Sensor (2 axis only) • Accuracy: 5x10-2 deg • Unit Price: 300K$ • Engineering – Significant Effort
Attitude Determination (cont.) • Sun Sensors & Magnetometers • Accuracy: 3x10-1 deg • Unit Price: negligible • Engineering – Minor Adaptations in Control Law • MEMS Rate Gyro • Accuracy: 1 deg/sec • Unit Price: negligible • Engineering – Heritage from other missions
Attitude Actuators • Reaction Wheels • Maximum Torque: 4 Nm • Unit Price: 300K$ • Engineering – Heritage from many missions • Hydrazine Thrusters • Maximum Torque: ~5 Nm • Unit Price: Combined with Propulsion system • Engineering – Heritage from other missions
Attitude Actuators (cont.) • Magneto-torquers • Maximum torque: 0.4 mNm • Unit Price: Negligible • Engineering – Heritage from other missions
Propulsion System • Hydrazine Thrusters • Thrust: 1N/5N/25N • 7 or 30 kg hydrazine tank • Unit Price: 1.6M$ • Engineering: Heritage from previous missions • Hall Effect Thruster • Thrust: 0.1 N • 5 kg Xe tank (equivalent to 30 kg hydrazine) • Unit Price: 5M$ • Engineering: In development for other mission • Both/None
Orbit Determination • GPS receiver • Accuracy: better than 15m • Unit Cost: 500K$ (fully redundant) • Engineering: Heritage from previous missions
Communication System • Hi-Speed X-band downlink • Bandwidth: up to 750 Mbps • Unit Price: 300K$ per 150 Mbps unit • Engineering – Heritage from other missions • Low Speed S-band transceiver • Bandwidth: up 2.5Kbps, down 12.5 Kbps • Unit Price: 400K$ • Engineering – Heritage from other missions • Both solution require a ground station • Communication only during a pass
Communication System (cont.) • Satellite Phone • Bandwidth: 50Kbps • Unit cost: TBD • Engineering: Integrating new system • TDRSS • Bandwidth: up to 10 Mbits/Sec • Unit cost: 0.5M$ • Engineering: Integrating new system • Both solutions have near continuous communication.
Onboard Storage • Onboard Recorder • Capacity: Redundant 120Gbits upgradeable to 480Gbits • Unit Cost: 350K$ • Engineering: Heritage from previous missions. • LEON-3 Avionics Computer • Capacity: 2GB • Unit Cost: Built in • Engineering: New unit in an advanced development stage.
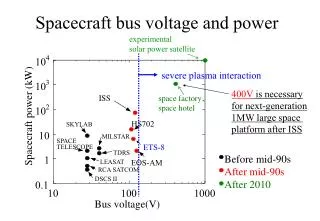
Power System • Battery: • Capacity: 30Ah / 45Ah • Unit Cost: 150K$ / 250K$ • Engineering: Heritage from previous missions • Deployable Solar Arrays • Triple Junction GaAs cells ~25% efficiency • Power generation: 800 W @ end of life
IMPS AOCS* system • Sensors: • 2 sun-sensors. • 2 magneto-meters. • MEMS coarse rate gyro. • GPS Receiver. • 2 Star Trackers. • Actuators: • 4 reaction wheels (1 spare). • 2 X 3-axis magento-torquers • 2 X 4 X 5N Hydrazine Thrusters • Propulsion System for orbit control (Four Alternatives): • 2 Hydrazine Thrusters (25N) • Hall Effect Thruster (0.1N) • Ground Station • Engineering *AOCS = Attitude & Orbit Control System
Recommended Configuration • Sensors: • Sun Sensors, Magnetometer, and MEMS rate gyro, GPS receiver • Star Trackers – only if the mission requires accurate attitude determination. • Actuators: • Reaction Wheels, Hydrazine Thrusters, and magneto-torquers. • Propulsion System: • Hydrazine Thrusters or none