Download
1 / 41
410 likes | 518 Views
5. 安装与拆除方法. HY-6020 系列板禁止带电插拔接插和拔下引线插头开关的设置及跳线器选择都必须在断电的情况下进行。. 6. 设置与编程. (1) 板卡基地址选择. 本模板的基地址选择范围是 512~1016(0200H~03F8H) ,当开关置 ON 位时该位有,效置 OFF 位时该位无效。 模板基地址计算公式如下: 板基地址 =512(0200H)+ 所有有效位之和 例 板基地址 =512+128=640 或 =0200H+80H=0280H. (2) 寄存器描述及板内地址分配.

E N D
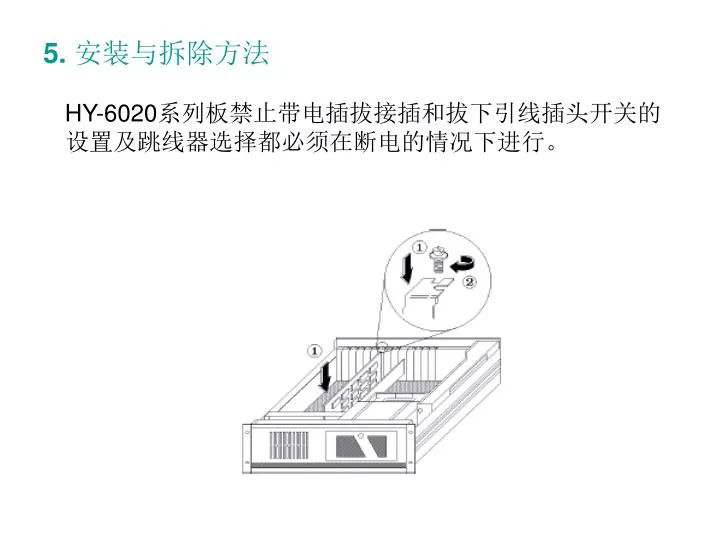
5. 安装与拆除方法 HY-6020系列板禁止带电插拔接插和拔下引线插头开关的设置及跳线器选择都必须在断电的情况下进行。
6. 设置与编程 • (1) 板卡基地址选择 • 本模板的基地址选择范围是512~1016(0200H~03F8H),当开关置ON位时该位有,效置OFF位时该位无效。 • 模板基地址计算公式如下: • 板基地址=512(0200H)+所有有效位之和 • 例 • 板基地址=512+128=640 • 或=0200H+80H=0280H
(2) 寄存器描述及板内地址分配 • 1 . 模拟输入通道选择寄存器(板基地址+0,写) • X:不用 • C4~C0模拟输入通道选择信号
2. A/D转换结果寄存器 • A/D转换结果低八位寄存器(板基地址+1,读) • A/D转换结果高四位寄存器(板基地址+2,读) • X:不用 • AD11~AD8,A/D转换结果高四位
(3) 编程方法举例 1. A/D编程 • 下面C语言例程为软件触发A/D和软件查询方式完成A/D转换功能,模拟输入范围为±5V增益为1。 • #include<dos.h> • #include<conio.h> • #include<stdio.h> • void main(void) • { • int baseA, dbyte, num; • float value; • baseA = 0x280; /*板基地址=640*/ • for( num=0; num<32; num++) { • outp( baseA, num ); /*切换输入通道并触发A/D*/ • do ; /*查询A/D完成位*/ • while(!( inp(baseA+5) & 0x80)); • dbyte=inp(baseA+1) | (inp(baseA+2)<<8); /*读A/D结果*/ • value=(float)(dbyte-2048)*10/4096; /*将A/D结果转换成输入电压值/ • printf("ch=%2d %+1.3fV ",num,value); /*打印结果*/ • } • printf("\n\n"); • getch(); • }
5.3.3 数字量输入/输出模板 • 1 HY-6160数字量输入/输出模板 • HY-6160板是IBM-PC XT/AT总线兼容的数字量输入/输出板。该板可以直接插入到IBM-PC XT/AT总线兼容机内的任一总线扩展槽中使用。HY-6160板为用户提供了32个数字量输入通道、32个数字量输出通道和一个外部事件中断通道。每8个输入或输出通道为一组,每组通道占用一个I/O地址。每个通道输出的信号与TTL电平兼容。 中断申请信号为TTL电平。数字量输出通道上电清零。
2 技术指标: • ·数字量输入通道数:32路 • ·数字量输入组数:4组(8Bit/组) • ·数字量输出通道数:32路 • ·数字量输出组数:4组(8Bit/组) • ·输入/输出信号电平范围:TTL电平兼容 • 输入低电平 VIL<=0.8V (最大值) • 输入高电平 VIH>=2.0V (最小值) • 输出低电平 VOL<=0.4V (最大值) • 输出高电平 VOH>=2.4V (最小值) • ·输出高电平电流:IOH=400mA (最大值) • ·输出低电平电流:IOL=8mA(最小值) • ·中断申请信号通道数:1路 • ·中断优先级:IRQ2或IRQ3 • ·中断申请信号有效电平:TTL电平兼容 • ·中断允许信号通道数:1路 • ·中断允许信号有效电平: TTL电平兼容, 低电平有效
用途:利用HY-6160板可以构成状态监测、事件输入、电动机/加热器控制、BCD码输入/输出等系统。通过外接HY系列的端子板,可以大大扩展HY-6160板的功能,满足各种应用领域的要求,直接应用于工业现场和实验室。用途:利用HY-6160板可以构成状态监测、事件输入、电动机/加热器控制、BCD码输入/输出等系统。通过外接HY系列的端子板,可以大大扩展HY-6160板的功能,满足各种应用领域的要求,直接应用于工业现场和实验室。
5.3.4 多功能定时/计数模板 • 1 HY-6210多功能定时/计数模板 • HY-6210板是IBM-PC XT/AT总线兼容的可编程定时/计数和数字量输入/输出板。该板可以直接插入到IBM-PC XT/AT总线兼容机内的任一总线扩展槽中使用,实现脉冲量计数、定时控制或现场开关量状态监测及控制执行机构工作等功能。 该板还提供了一路中断请求申请信号,可选择定时/计数器0的输出或用户数字量输入或8255的C口请求。HY-6210板的典型应用为数字量输入/输出、频率测量、马达控制信号发生器、事件计数等。
2 性能 • 定时器/计数器部分 • ·定时/计数器通道:3路 • ·定时/计数器长度:16位 • ·内部时钟频率:2MHz • 数字量部分 • ·数字量输入/输出通道数:24路(双向可编程) • ·数字量输入/输出频率:0-1MHz • ·中断允许信号通道数:1路 • ·中断级别:IRQ2~IRQ7可选择 • ·中断申请信号有效电平:高、低电平可选 • ·中断允许:软件控制
3 技术指标 • 定时器/计数器部分 • 外部时钟输入频率: 0-2MHz • ·定时/计数器输出脉冲频率:0.001Hz-1Mhz • ·占空比:0-100% • ·定时/计数器信号输入电平特性: • 高电平: VIH.>=2.0V 高电平电流: IIH<=20mA • 低电平: VIL<=0.8V 低电平电流: IIL>=20mA • ·定时/计数器信号输出电平特性: • 高电平: VOH>=2.4V 高电平电流:IOH<=400mA • 低电平: VOL<=0.4V 低电平电流:IOL>=2.0mA • 数字量部分 • ·输入信号及中断请求信号电平特性: • 高电平:VIH>=2.0V 高电平电流:IIH<=40mA • 低电平:VIL<=0.8V 低电平电流:IIL>=40mA • ·输出信号及中断请求信号电平特性: • 高电平: VOH>=2.4V 高电平电流:IOH<=400mA • 低电平: VOL<=0.45V 低电平电流:IOL>=2.0mA
4 功能 • 事件及频率检测,周期及脉冲信号测量,可编程脉冲信号发生器,电机控制,频率发生器,开关量状态监测。
5. 组成与工作原理 • 在HY6210板上有两片可编程芯片,一片8253可编程定时/计数器和一片8255可编程数字量输入/输出芯片,其中8253可编程定时/计数器有三个独立的可编程定时/计数器,为用户提供了3个16位可编程定时/计数器。8255可编程数字量输入/输出芯片为用户提供了24路可编程数字量输入/输出。
5.3.5 工业控制机及其接口模板应用举例 • 全自动汽车安全性能检测线测控系统 • 1. 应用背景 • 目前我国汽车安全性能检测实行定期检测,过去对机动车的安全检测基本采用眼看、耳听、手摸等人工经验判断的方法。近十余年以来,已经实现了汽车安全检测的仪器化。而采用计算机、智能化仪器仪表和网络技术研制、推广先进的汽车安全检测系统,可以大大地提高检测精度和准确性,并能有效地降低检测时间和检测人员的劳动强度。
2. 汽车安全性能检测的项目 • (1) 汽车尾气排放量检测 • 检测汽车尾气中有毒物质的排放浓度,使用排放分析仪检测;通常汽油车检测 CO和HC的含量,柴油车检测烟度。
(2) 车速表精度检测 • 检测汽车车速表指示精度,使用车速表试验台检测;
(3) 前照灯性能检测 • 检测汽车前照灯亮度、光轴偏移角等参数,通常使用自动式汽车前照灯测试仪检测,分左右灯检测;
(4) 喇叭声级 • 检测汽车喇叭声音的大小,采用声级计检测; • 90~115dB(A)
(5) 侧滑量检测 • 检测汽车前轮的侧滑量大小,采用侧滑试验台检测。
(6) 汽车轴重与总重量测试 • 检测汽车各轴轴重与总重量,为制动力检测作准备,使用轴重测试仪测量,每次测量一个轴的重量。
(7) 制动力检测 • 检测汽车各个车轮的制动力和手制动力,判定汽车制动性能是否合格,使用制动试验台测试,每次测量一个轴上的两个车轮的制动力。
4. 自动测控系统软硬件的构成与实现 • (1) 检测功能划分 • 将检测功能与设备划分成三个区: • 1区负责车辆信息登记; • 2区包括排放、车速、灯光、喇叭、侧滑检测; • 3区包括轴重、制动力检测和检测结果打印,数据库管理。
(2) 系统硬件配置 1 计算机 • 采用3台工业控制计算机,每台计算机配有10/100M的网卡,采用总线型或星形拓扑结构将三台计算机联网。三台计算机编号为1#、2#、3#,分别完成对应的3个功能区的工作。
2 数据采集系统 • 数据采集是保证检测数据准确性的关键。 • 信号从各传感器直接引出,这样可增加系统的可靠性,即使设备其他部分发生故障,系统也不致停顿。2#、3#控制工作站扩展槽各插有一块具有12位A/D的模拟量接口模板; • 信号的调理:将模拟信号转换成数字信号,首先要对传感器信号进行预处理, 使各传感器信号转换为统一的0~+5V的模拟量。 • 信号传输过程中会叠加干扰信号, 采用模拟滤波和数字滤波相结合的方法消除干扰, 模拟滤波主要滤掉50Hz的交流干扰, 数字滤波则消除尖峰干扰,使过程曲线平滑,采用防脉冲干扰复合滤波法 。
3. 车辆位置与检测设备的监测和控制 • 在自动检测线中,车辆位置与检测设备的监测和控制是保证自动检测线按正确逻辑运作的关键。 • 监测汽车在检测线上位置的传感器采用用高质量远红外光电开关;根据各个光电传感器的输出状态判断车辆的位置。 • 控制车速表试验台和制动试验台举升器升降及电机起停,采用开关量输出信号,通过控制继电器和交流接触器来实现控制,开关量的输入输出由插在2#和3#计算机扩展槽内的数字量输入输出接口卡提供。
4. 检测指示装置 • 为了给试车员提供指示,检测线用高亮度LED发光块组成显示灯牌,指挥司机的操作并实时显示检测数据。LED显示牌采用8031单片机控制, 为了加快实时显示速度,命令及数字字模都固化在EPROM中。 LED显示牌由RS-232口接收主机发出的命令代码。 • 通常采用2~3块显示牌。
局域网(以太网) LED显示牌 打印机 LED显示牌 3#机 2#机 1#机 RS-232C I/O卡 I/O卡 A/D卡 A/D卡 信号调理箱 信号调理箱 声级计 灯光测试仪 排放测试仪 车速表试验台 侧滑试验台 轴重试验台 制动试验台 系统硬件构成
(3) 软件设计 • 1. 系统软件配置 • 操作系统采用Windows操作系统,数据库一般采用Access等小型数据库。
2. 应用软件设计 • 应用软件主要有4个子系统组成:车辆信息输入子系统、检测主控子系统、数据库管理子系统。 • (1) 车辆信息输入子系统 • 车辆信息输入子系统运行在1#机上,采用人机对话表格式输入方式, 登录待检车辆牌照号码、车辆型号、颜色、发动机号等基本数据, 登记完毕后,经网络发送给2#机。在1#机中可连续输入若干车辆的数据暂存于2#机中, 提高了运行的效率。
(2) 检测主控子系统 检测主控子系统分别运行在2#和3#计算机上,分别完成相应的测控任务。 它包括如下几个部分: 1) 硬件系统测试程序 测试各个模拟信号通道,开关量输入输出工作状态。在接通所有检测设备和计算机系统电源,预热10min以后,进行硬件测试。A/D转换器模拟量信号以表格形式显示零位电压、实测电压、放大系数和量值。从零位时的量值立即可以判定故障通道。零点漂移也可用修改功能加以补偿。选择开关输入量测试,监视可显示每个结点的地址和状态。当开关量动作时,状态高低电位必须变化,若不变化即可确定故障点。
2) 检测主程序 • 操作人员在2#机选中待检车辆后,检测主程序不断监测各个光电开关状态,判断车辆位置,当车辆到达预定的检测设备监测位置后,按照规定的检测逻辑顺序进行自动检测,即对测量数据进行数据采集,存入相应的数据变量当中。 • 当2#机所有项目检测完毕后,将测量数据以数据文件的方式通过网络传递给3#机,3#机接收到数据后,采用和2#计算机相同的方式完成测控工作。当3#计算机负责的所有项目检测完毕后,将检测结果数据及其判定结果以表格的形式打印出来,并将数据写入检测数据库中。
(3)数据库管理子系统 • 对检测的结果数据进行动态管理。软件有查询和统计2个模块。查询模块可根据检测日期和车牌号, 随时查询检测记录单和合格单。统计模块不但能进行日、月、年统计,而且只要输入统计的起始时期和终止日期,可以进行任意输入指定时期内的车辆全合格率、单项合格率,作为质量管理的可靠依据。
汽车安全性能检测线自动控制系统采用计算机网络控制模式,结构简单,可靠性高,在微机运算速度愈来愈高,价格不断下降的情况下日益显示出系统的优越性。系统的软件设计最大限度满足了系统控制、图形显示及数据库管理的功能,大大地提高了检测精度与速度,改善了检测人员的劳动环境,在实际运行中经受了恶劣条件和时间的考验,能够满足实际使用要求。汽车安全性能检测线自动控制系统采用计算机网络控制模式,结构简单,可靠性高,在微机运算速度愈来愈高,价格不断下降的情况下日益显示出系统的优越性。系统的软件设计最大限度满足了系统控制、图形显示及数据库管理的功能,大大地提高了检测精度与速度,改善了检测人员的劳动环境,在实际运行中经受了恶劣条件和时间的考验,能够满足实际使用要求。