Download
1 / 26
260 likes | 274 Views
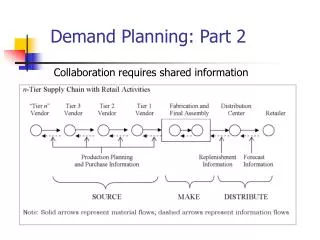
This article explores the use of a model-based execution approach with a planner for temporal planning. It covers task decomposition, execution histories, goals, projective task expansion, scheduler, and temporal planner.

E N D
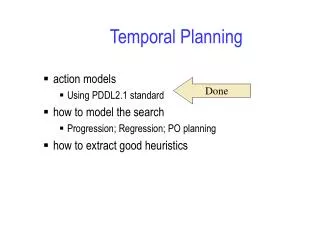
Temporal Planning: Part 2 Brian C. Williams 16.412J/6.834J Oct 3rdst, 2001 1
Model-based Execution (w planner) Task-Decomposition Execution Histories(?) Goals Projective Task Expansion Scheduler Temporal Planner Flexible Sequence (Plans) Task Dispatch Plan Runner Goals Modes Reactive Task Expansion Commands Observations
Outline • Representing Plans • Representing Time • Plan Consistency and Scheduling
Cassini Saturn Orbital Insertion courtesy JPL
Planning in a continuous world Attitude Control System
Planning in a continuous world • Turn (a, b) Attitude Control System
Planning in a continuous world • Turn (a, b) Attitude Control System
Planning in a continuous world • Turn (a, b) Attitude Control System
Planning in a continuous world • Turn (a, b) Attitude Control System
Planning in a continuous world • Turn (a, b) Attitude Control System
Planning in a continuous world • Turn (a, b) Attitude Control System
Planning in a continuous world: • Point (b) Attitude Control System
Planning in a continuous world: • Point (b) Attitude Control System
Action/State dichotomy in a continuous world • Turn is an action, Point is a state • Both Turn and Point are actions • Both Turn and Point are state Point (b) Turn (a, b) Attitude Control System
Tokens represent procedure invocations Delta_V(direction=b, magnitude=200) Point(a) Point(b) Turn(b,a) Turn(a,b) Off Both Actions and States are Tokens Thrust Goals Power Attitude Thrust (b, 200) Engine Off Warm Up
Delta_V(?x, ?y) Off f Planning Constraints are Specified by Compatibilities Thrust Goals Power equals contained_by Point(?x) Attitude contained_by meets met_by Thrust (?x, ?y) Engine Warm Up
Delta_V(direction=b, magnitude=200) Example of Compatibility Instantiation Thrust Goals Power contains Attitude Thrust (b, 200) Engine
Delta_V(direction=b, magnitude=200) Off Example of Compatibility Instantiation Thrust Goals Power equals contained_by Point(b) Attitude contained_by meets met_by Thrust (b, 200) Engine Warm Up
Planning Experts Search Control Search engine Model (DDL) Planner/Scheduler Architecture Engine Domain Knowledge Goals Plan Plan Database Initial state to EXEC from EXEC
Plan has flaws Plan is consistent Planner Resolves Flaws PLAN NO Uninstantiated compatibility . . . Instantiate compatibility . . . Backtrack Schedule token NO YES
Types of Flaws • No Disjunct of Compatibility Selected. • Unsatisfied Subgoal • There is a hole in the timeline immediately before Thrust (b, 200) • Floating Token, Needs to be Placed on Timeline. • Uninstantiated Variable in a Token • Thrust (?x = {a, b, c}, ?y = [190, 300] The Plan Database can be modified only by primitives that resolve each of these flaws.
Planning Experts Search engine Model (DDL) Planner/Scheduler Architecture Engine Domain Knowledge Search Control Goals Plan Plan Database Initial state to EXEC from EXEC
Search Control Determines Order and Type of Flaw Resolution PLAN T f2I(P): Plan has no subgoal flaws Unsatisfied subgoal Search Control . . . Instantiate subgoal . . . . . . Backtrack Schedule token f1I(P): Plan is consistent F {T, ?}
Ready( ) Search Control Language met_by Turning_on( ) Camera: (:subgoal (:master-match (Camera = Ready)) (:slave-match (Camera = Turning_on)) (:priority 50) (:method-priority ((:method :add) (:sort :asap)) ((:method :connect)) ((:method :defer))))
DS1 Planner/Scheduler • DS1 PS is a constraint-based, backtrack search, generative planner operating on a fully temporal domain model • Model size (Remote Agent Experiment) • state variables 18 • procedure types 42 • Plan size • tokens 154 • variables 288 (81 time points) • constraints 232 (114 distance bounds) • Performance • search nodes 649 • search efficiency 64 %
Model-based Execution (w planner) Task-Decomposition Execution Histories(?) Goals Projective Task Expansion Scheduler Temporal Planner Flexible Sequence (Plans) Task Dispatch Plan Runner Goals Modes Reactive Task Expansion Commands Observations