Download
1 / 90
990 likes | 1.21k Views
SISTEME de PROCESARE a SEMNALELOR.

E N D
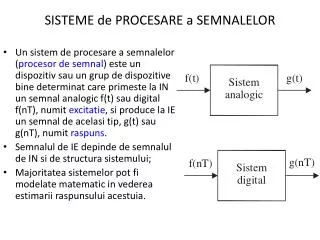
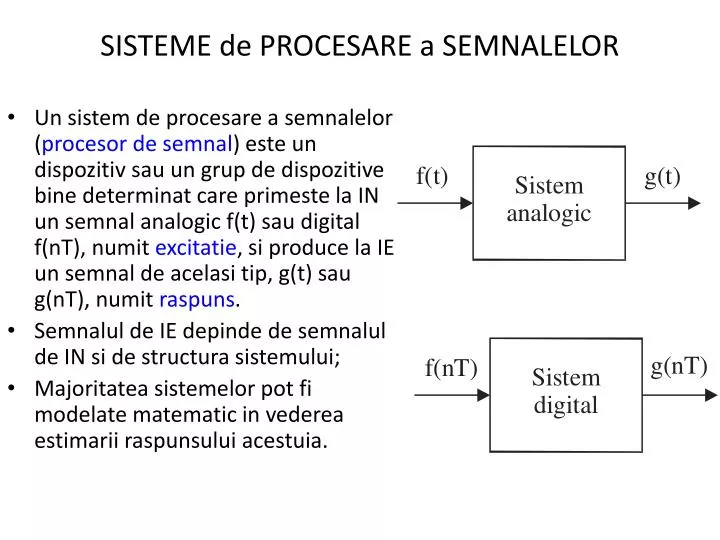
SISTEME de PROCESARE a SEMNALELOR • Un sistem de procesare a semnalelor (procesor de semnal) este un dispozitiv sau un grup de dispozitive bine determinat care primeste la IN un semnal analogic f(t) sau digital f(nT), numit excitatie, si produce la IE un semnal de acelasi tip, g(t) sau g(nT), numit raspuns. • Semnalul de IE depinde de semnalul de IN si de structura sistemului; • Majoritatea sistemelor pot fi modelate matematic in vederea estimarii raspunsului acestuia.
SISTEME de PROCESARE a SEMNALELOR • O categorie importanta a sistemelor de procesare a semnalelor o reprezinta sistemele liniare si invariante in timp; • Un sistem este liniar daca raspunsul sau la o suma de excitatii este egal cu suma raspunsurilor individuale corespunzatoare fiecarei excitatii in parte, daca aceasta ar fi fost aplicata separat; • In functie de tipul semnalelor cu care lucreaza, SPC se impart in sisteme analogice (continue) si sisteme digitale (numerice).
Clasificarea sistemelor de prelucrare a semnalelor • Dupa natura semnalelor procesate: sisteme analogice (continue in timp continuu-amplificatorul de semnal audio) si sisteme digitale (sist. care prelucreaza semnalele in timp discret-PC, sisteme de calcul); • Sisteme liniare / neliniare; Un sistem este liniar atunci cand marimea de IE se poate exprima f-ctie de marimea de IN. • Sisteme variante / invariante in timp; Sistemele invariante in timp sunt sisteme la care raspunsul sist. va fi acelasi, indiferent de momentul aplicarii semnalului de IN. • Sisteme cauzale / necauzale; Sistemele cauzale sunt cele la care marimea de IE nu depinde decat de valori ale marimii de IN, anterioare momentului curent. La sistemele necauzale IE depinde si de valori viitoare ale marimii de IN.
Sisteme analogice. Procesarea semnalelor analogice • Datorita faptului ca semnalele analogice pot fi convertite aproape intotdeauna in semnale electrice, sunt implementate in majoritatea cazurilor prin retele electrice formate din elemente conventionale: rezistente, condensatoare, bobine, transformatoare, tranzistori, amplificatoare operationale etc; • Aceste elemente efectueaza diverse operatii elementare asupra semnalelor: • Multiplicare:g(t)=K*f(t);(daca k<1:atenuare, daca k>1:amplificare); • Derivare (diferentiere); • Integrare; • Insumarea mai multor semnale
Procesarea semnalelor analogice sinusoidale in timp continuu • Semnalele sinusoidale sunt singurele din natura care se propaga prin sisteme liniare fara a fi deformate; • Daca la IN unui sistem liniar se aplica o sinusoida, la IE va apare tot o sinusoida de amplitudine si faza diferite; (Amplitudine diferita=mai mare sau mai mica).
Un factor important atunci când utilizăm filtre trece-jos sau trece-sus îl reprezintă locul unde le plasăm în calea semnalului. Înainte de apariţia procesoarelor şi controlerelor, toate filtrele erau analogice. Aceasta înseamnă că era mai înţelept să folosim hârtia şi creionul înainte de a ne apuca să construim un prototip.
Orice încercare de a evita această etapă conducea de fiecare dată la obţinerea unui rebut. Sosirea filtrelor digitale a adus cu ele capabilitatea de a copia răspunsul în frecvenţă al oricărui filtru analogic. Mai mult, au adus facilitatea de a fi uşor reglabile cu ajutorul unui program intern - firmware.Totuşi, filtrele digitale nu reprezintă soluţia corectă pentru toate problemele .
În sistemele de achiziţie de date, un filtru trece-jos este utilizat (imediat) înaintea convertorului A/D pentru a reduce zgomotul de înaltă frecvenţă. Există două idei greşite în ceea ce priveşte necesitatea utilizării filtrelor trece-jos din sistemele de achiziţie de date. Prima greşeală apare atunci când se consideră că nu este necesar un filtru de netezire atunci când sunt convertite semnale de curent continuu sau de joasă frecvenţă. Se consideră că atunci când se lucrează cu semnale de joasă frecvenţă nu există zgomot şi ca urmare proiectanţii decid că filtrele trece-jos nu sunt necesare în acest caz.
A doua neînţelegere este aceea că etajul de intrare al convertorului A/D va filtra semnalele deasupra frecvenţei de eşantionare sau că frecvenţa de eşantionare limitează banda de frecvenţă care este convertită. Ambele puncte de vedere nu sunt corecte. Convertorul A/D este un sistem de eşantionare care va lua un eşantion de semnal de oriunde din conţinutul de frecvenţă. Colecţia acestor eşantioane oferite de convertor de-a lungul timpului va oferi o reprezentare digitală a semnalului în domeniul de frecvenţă ½ din frecvenţa de eşantionare. Procedeul este cunoscut sub numele de netezire (aliasing).
Zgomotul poate fi definit ca reprezentând semnale electrice interne şi externe aleatorii şi imprevizibile produse prin procese naturale şi interferenţe. Zgomotul intern poate fi cauzat de energia termică, zgomot generat în cadrul dispozitivelor, şi aşa mai departe. Zgomotul exterior este cauzat de efecte atmosferice, cum ar fi furtuni şi activităţi solare. Interferenţa este zgomotul produs de surse artificiale, cum ar fi emiţătoare de la alte sisteme de comunicare, liniile electrice şi maşini.
Zgomotul intern în sistemele electronice Nivelul de zgomot este un concept important în toate tipurile de dispozitive electronice. Nivelul de zgomot este reprezentat de semnale nedorite generate intern de către dispozitivul de sine sau de către semnale care sunt externe şi care îi subnt impuse. Exista mai multe tipuri diferite de zgomot, astfel: zgomot termic, zgomot de alice, excesul de zgomot, de zgomot de spargere, partiţie de zgomot, de recombinare de zgomot, şi zgomotul la faţa locului. Zgomotul termic Intr-un dispozitiv electronic, zgomotul nu are o marime constanta. Atat timp cat rezistenta dispozitivului este constanta pentru diferite polarizari, zgomotul termic va fi constant. Daca polarizarea schimba si valoarea rezistentei, zgomotul termic se va modifica. Din aceasta cauza este necesara o analiza detaliata pentru dispozitive neliniare, pentru a decide daca trebuie inlocuit R prin V/I sau dV/dI sau chiar prin altceva in cadrul expresiei 4kTR. Zgomotul termic este intotdeauna prezent, rezistenta determinindu-i neechivoc marimea; el nu poate fi anulat sau redus doar prin alegerea unor materiale diferite.
Zgomotul de alice De asemenea, nu exista solutie nici impotriva zgomotului de alice. In cazul in care este dat de electroni emisi la intimplare, curentul I il defineste in intregime. Atat zgomotul termic, cat si cel de alice sunt esentiale pentru conductia electrica. Ele reprezinta, de asemenea, mijloace de determinare a constantelor fundamentale k (constanta lui Boltzmann) si q (sarcina electronului). Zgomotul de licarire (1/f) Este cunoscut in literatura de specialiate sub denumirea de Fliker noise. Este prezent in semiconductoare dar si in elemente pasive cum ar fi rezistentele de carbon. Nu este inca o teorie unitara a cauzelor acestui tip de zgomot, asociat esential cu trecerea unui curent continuu prin substratul masurat. Se considera in general ca fiind un zgomot determinat de prezenta defectelor din reteaua cristalina, sau acumularii de sarcini electrice si eliberare lor brusca. Zgomotul de explozie Este cunoscut in literatura de specialitate sub denumirea de "burst noise" sau “popcorn noise”. Este considerat un zgomot de joasa frecventa, legat de prezenta contaminarii cu ioni ai metalelor grele. (astfel, dispozitivele semiconductoare dopate cu aur, prezinta un nivel ridicat al acestui tip de zgomot). Zgomotul de generare-recombinare poate fi eliminat printr-o tehnologie ingrijita de fabricare a dispozitivelor.
Interferenţa Zgomotul poate fi, de asemenea, transmis circuitelor electronice din surse externe. Există mai multe clasificări ale zgomotelor transmise, în funcţie de modul în care acestea afectează semnalul de ieşire şi de modul în care acestea intră în circuitele electronice. Zgomotul transmis poate fi magnetic, capacitiv, sau electromagnetic. Zgomotul de interferenţă poate fi aditiv sau multiplicativ raportat la semnalul de ieşire. În zgomotul aditiv, amplitudinea zgomotului este independentă de amplitudinea semnalului util. În mod evident, în cazul în care nu există nici un alt semnal de la aparat, este observat doar zgomotul. Expresia zgomotului aditiv este: Vout = Vsignal + Vnoise. În cazul zgomotului multiplicativ, semnalul devine modulat în funcţie de zgomotul transmis. Aceasta creşte împreună cu amplitudinea semnalului. Zgomotul multiplicativ este exprimat ca: Vout = Vsignal + Vsignal x Vnoise.
Zgomote şi distorsiuni în sistemele de comunicaţie La frecvenţe mai mari de 30 MHz, zgomotul generat intern este, în general, mai mare decât zgomotul exterior primit de antenă. Fără filtrare, zgomotul va avea o gamă largă de componente de frecvenţă. Puterea zgomotului este exprimată prin ecuaţia Pn = kTB, unde Pn puterea disponibilă a zgomotului în waţi, T este temperatura de zgomot în grade Kelvin, k este constanta Boltzmann (1.38 × 1023), şi B este lăţimea de bandă eficace de zgomot în Hertz.
Ce este filtrarea ? • Cunoaştem din teoria de bază a electronicii că bobinele şi condensatoarele au impedanţa (X) care depinde de frecvenţă, după cum se defineşte mai jos: • Când oricare dintre componente este combinată cu un rezistor vom putea construi divizoare de tensiune dependente de frecvenţă.
Dacă aplicăm acum legea lui Ohm acestui circuit, putem vedea că:
Funcţia de transfer are ambele componente: amplitudine şi fază. Acestea sunt următorele:
Din aceasta putem găsi, după calcule, că câştigul divizorului nostru de tensiune este dat de: Dacă reprezentăm grafic aceasta în funcţie de frecvenţă, obţinem un răspuns care e prezentat în figura
Putem vedea că pentru o tensiune de intrare existentă, la frecvenţe ridicate ieşirea este aproximativ egală cu intrarea şi la frecvenţe joase ieşirea tinde asimptotic la zero. Acest circuit este numit filtru trece-sus, deoarece permite doar frecvenţelor înalte să treacă neatenuate.
Această tratare matematică poate fi repetată cu bobine • În general, pentru proiectarea filtrelor analogice sunt utilizate condensatoare şi rezistoare deoarece bobinele sunt voluminoase în comparaţie cu acestea, mai scumpe şi nu au performanţe aşa de bune. • Bobinele reale conţin de asemenea rezistenţe şi capacităţi parazite, determinând ca răspunsul lor actual în amplitudine să se depărteze semnificativ faţă de ideal.
Structurile simple de filtre RC, cum au fost descrise anterior, produc filtrări cu atenuări blânde de amplitudine de aproximativ 6dB/octavă. Pentru a realiza rate de atenuare mai rapide este posibil să legăm în cascadă astfel de filtre într-o structură numită filtru-scară
Cu fiecare circuit adiţional RC va creşte atenuarea 6dB/octavă. De exemplu o reţea cu trei nivele va avea o atenuare de 18dB. • Este interesant de notat că o metodă de descriere a filtrelor este de a ne referi la numărul modulelor RC pe care acestea le conţin ca la “ordinul” filtrului: un filtru cu trei nivele va fi un filtru de ordinul trei.
De aici, vom putea greşi crezând că proiectarea unui filtru de ordinul n este la fel de simplă ca şi montarea în cascadă a n secţiuni similare RC. • Din nefericire, nu aşa stau lucrurile. Analiza iniţială a unui circuit de ordinul întâi presupune că impedanţa sarcinii este infinită. • În consecinţă, o dată ce începem adăugarea mai multor elemente RC vom afecta semnificativ impedanţa sursei şi a sarcinii pentru fiecare modul, şi va trebui astfel să recalculăm răspunsul în frecvenţă al întregului sistem proiectat.
Criteriile de performanţă ale filtrelor • Trebuie să fie anumite criterii agreate prin care putem compara performanţele relative ale a două filtre similare. În general, este utilizat răspunsul în amplitudine al filtrului care e prezentat în figura
Figura indică o caracteristică tipică a unui filtru trece-jos. • Banda de trecere este definită ca fiind gama de frecvenţe deasupra cărora semnalele trec în fapt neatenuate prin circuit. Banda de trecere se extinde până la punctul unde răspunsul cade la 3dB, care este cunoscută ca frecvenţă de tăiere (f3dB). Este posibil să se proiecteze filtre care să nu aibă riplu deasupra acestei benzi de trecere (vezi mai târziu), dar de obicei acceptăm un anumit nivel al riplului în această regiune în schimbul unei mai rapide atenuări a amplitudinii cu frecvenţă în zone de tranziţie.
Zona de tranziţie este suprafaţa dintre banda de trecere şi banda de oprire. Ne-am referit deja la atenuare în această bandă. Această rată de modificare a amplitudinii cu frecvenţa este un alt criteriu important în estimarea performanţelor filtrului. • Banda de oprire este aleasă de proiectant în funcţie de cerinţe. De exemplu, ea poate fi definită acolo unde răspunsul în amplitudine scade sub –40dB. În altă aplicaţie banda de oprire trebuie să fie întotdeauna sub specificaţiile de proiectare. Există câteva tipuri de filtre (de exemplu cu riplu egal) care au riplu în banda de oprire. Atâta vreme cât acest riplu este sub nivelul cerut al benzii de oprire, aceasta are unică importanţă.
Nu este realistic să descriem un filtru numai prin variaţia amplitudinii cu frecvenţa. Altă caracteristică importantă este răspunsul în fază că răspunsul în fază a fost dat de
un filtru cu un răspuns de fază liniar întârzie toate frecvenţele cu un acelaşi timp
Invers, un filtru cu un răspuns de fază neliniar determină ca toate frecvenţele să fie întârziate cu diferite perioade de timp, aceasta însemnînd că semnalul va apărea distorsionat la ieşirea filtrului. În aplicaţiile de radio-frecvenţă (RF) suntem familiari cu fenomenul de “scattering” al unui semnal radio datorită diferitelor şi variatelor lungimi de undă. Acest efect este foarte asemănător cu exemplul nostru a unei faze neliniare într-un filtru.
Dacă e să fim realistici când proiectăm filtre, faza liniară este actualmente importantă numai în banda de trecere şi banda de tranziţie a filtrului din moment ce toate frecvenţele de acum încolo sunt atenuate. De asemenea, cum majoritatea proiectelor sunt un compromis, adesea rămânem cu mici variaţii în răspunsul de fază, pentru a obţine o performanţă mai bună în alte caracteristici, de exemplu atenuarea filtrului sau ordinul acestuia.
Putem de asemenea descrie un filtru folosind răspunsul în domeniul timp. Figura prezintă un răspuns tipic pentru un filtru trece-jos când o variaţie treaptă de tensiune este aplicată la intrare
Mărimile uzuale de performanţă pentru răspunsul unui filtru în domeniul timp sunt: • Timp de creştere: timpul necesar pentru ca ieşirea să atingă 90% din valoarea maximă • Timp de stabilire: timpul necesar pentru ca ieşirea să se stabilizeze în plaja de 5% din valoarea finală (t5) • Supramodularea: valoarea cu care ieşirea depăşeşte momentan valoarea dorită, după nivelul tranziţiei • Ringing: oscilaţii spre valoarea finală (medie)
Să examinăm acum răspunsul unui filtru simplu trece-jos în timp, când un număr de variaţii treaptă sunt aplicate la intrare.
Vom găsi că constanta de timp reprezintă timpul necesar condensatorului de a atinge 63% din valoarea sa finală. • De asemenea, putem obţine faptul că de cinci ori constanta de timp a condensatorului va fi încărcată la 1% din valoarea sa finală (de tensiune). • Putem utiliza aceste două figuri pentru a calcula ieşirea filtrului.
Hai să ne uităm acum la ce se întâmplă când aplicăm semnalul de intrare prezentat în figura
Dacă presupunem că condensatorul este iniţial descărcat, pe durata primei perioade tensiunea condensatorului va creşte exponenţial spre valoarea de 1V, şi apoi după o perioadă de 1ωS Vaut va atinge valoarea de 0.63V. • În acest moment, semnalul de intrare sare la 2V astfel că diferenţa între tensiunea de ieşire Vaut actuală şi cea dorită este de 1.37V. Condensatorul începe să se încarce din nou cu această nouă tensiune şi la sfârăitul a 2ms Vaut va avea valoarea • Vout =0,63 + (0,63 x 1,37) = 1,49 V
Repetând aceste calcule găsim că tensiunea de ieşire Vaut urmăreşte curba prezentată în figura Efectul filtrului a fost acela de netezi forma de undă de la intrare şi de a rotunji orice schimbări bruşte. De fapt filtrul a realizat o medie în mişcare a semnalului de intrare.
Tipuri de filtre Motivul pentru alegerea unui anumit filtru va fi importanţa relativă a diferitelor mărimi. Am văzut că principalele caracteristici sunt riplul benzii de trecere, frecvenţa de tăiere (f3dB), căderea şi atenuarea benzii de oprire. La acestea putem de asemenea adăuga răspunsul în fază. Există un număr de tipuri de filtre care optimizează una sau mai multe din aceste caracteristici şi sunt comune atât proiectării filtrelor analogice cât şi celor numerice.
Filtru Butterworth • 1930 - Stephen Butterworth • Filtrul Butterworth are un răspuns în amplitudine complet plat de-a lungul benzii de trecere şi este adeseori menţionat ca filtrul cel mai plat. • Această bandă de trecere plată este realizată pe cheltuiala regiunii de tranziţie, care are o cădere foarte uşoară şi a răspunsului în fază care este neliniar în jurul frecvenţei de tăiere.
Câştigul unui astfel de filtru este dat de unde n este ordinul filtrului. Dacă mărim ordinul filtrului, regiunea plată a benzii de trecere devine mai apropiată de frecvenţa de tăiere înainte ca aceasta să cadă şi astfel putem îmbunătăţi panta
Filtrul Butterworth poate apare ca o soluţie ideală pentru toate proiectele dar, de multe ori nu satisface cerinţele circuitului, fie din cauză că trebuie să utilizăm un filtru cu un ordin excesiv de mare pentru a realiza căderea specificată, fie din cauza relativ slabului său răspuns în fază. • În cele mai multe aplicaţii putem tolera o anumită mărime a riplului în banda de trecere, în schimbul unei mai mari pante în regiunea de tranziţie.
Filtrul Chebyshev • Filtrul Chebyshev furnizează acest schimb: el permite o anume mărime a riplului în banda de trecere însă are o foarte mare pantă de cădere. Răspunsul în amplitudine al uni filtru Chebyshev este dat de unde Cn este un polinom special care este funcţie de n (ordinul filtrului) şi ε este o constantă care determină mărimea riplului în banda de trecere.
Chiar dacă setăm nişte limite strânse pentru riplul benzii de trecere, îmbunătăţirea constând în mărirea pantei este considerabilă în comparaţie cu filtrele Butterworth. • Se poate vedea că pentru un riplu de 0.1 dB în banda de trecere şi o atenuare de 20 dB în banda de oprire la 25% după frecvenţa de tăiere (f3dB), avem nevoie de un filtru Chebyshev de ordinul 8 sau un filtru Butterworth de ordinul 19.
Deşi filtrul Chebyshev este o îmbunătăţire a filtrului Butterworth cu privire la panta, ambele au un răspuns de fază prost, cel al filtrului Chebyshev fiind chiar mai slab. Stilul filtrului Chebyshev este uneori numit filtru echiriplu, deoarece riplurile sale sunt totodeauna egale în mărime de-a lungul benzii de trecere. În plus, numărul riplurilor creşte cu ordinul filtrului.