Download
1 / 28
320 likes | 689 Views
6.4 Elastic and Inelastic Collisions.

E N D
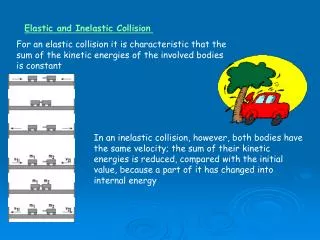
6.4 Elastic and Inelastic Collisions A collision is an interaction between objects that causes an exchange of energy and/or momentum. As mentioned in the last lecture, the colliding objects don’t always need to physically make contact – if they attract or repel each other by non-contact forces, then they can still exchange energy/momentum. Collisions are classified into two types, elastic and inelastic. In an elastic collision, the total kinetic energy is conserved (although some objects may lose KE while others gain KE). Thus, any problem involving an elastic collision can be analyzed starting with the condition that . Note that this condition only relates KE at the beginning and end of the collision. During the collision, there may be a brief period of time where KE is converted to PE, but it must eventually be converted back to KE.
6.4 Elastic and Inelastic Collisions In an inelastic collision, total kinetic energy is not conserved. Rather, a portion of it is converted to some other form of energy. Often this is heat or sound, but (as in the case of a car accident), sometimes a collision causes a permanent structural deformation of the object(s); work is required in order to achieve this, and a portion of KE is therefore lost. Overall, we can state that for an inelastic collision, . Regardless of the type of collision, as long as the system of the colliding objects is closed (isolated), linear momentum is always conserved. In the realm of everyday objects, it is difficult to conceive of a situation that results in a perfectly elastic collision. However, if the kinetic energy is changed by only a relatively small amount, we can treat the collision as elastic without introducing significant error.
6.4 Elastic and Inelastic Collisions It is possible for an inelastic collision to occur in which the colliding objects stick together after the collision – the text mentions an example of two railcars that bump, couple together, and travel along while linked. This is termed a completely inelastic collision. Take care that you understand this definition. Many students assume that a completely inelastic collision is one in which the final kinetic energy is zero. This is not true; the final KE is determined by momentum conservation, as we shall see. What we can say about a completely inelastic collision is that both objects have the same final velocity (since they’re joined together).
6.4 Elastic and Inelastic Collisions For the various types of collisions, the initial (pre-collision) conditions of motion are closely related to the final (post-collision) conditions. Momentum and Energy in Completely Inelastic Collisions Stationary Target Consider the completely inelastic collision shown on the previous slide, in which the “target” object is motionless prior to the collision. Conservation of linear momentum dictates that Therefore, if we know the masses and the initial speed of mass 1,
6.4 Elastic and Inelastic Collisions Since we now have all of the information on masses and speeds, we can calculate the ratio of final to initial KE (see pp 197-198 of the text): Since , this tells us that it is not possible for 100% of the initial KE to be lost (remember, we’re only considering the case of a stationary target). If (a “massive projectile”), then almost no KE is lost. If (a “massive target”), then almost all KE is lost. If the masses are equal, exactly half of the KE is lost. In any case, the fraction of KE that is lost must be consistent with the conservation of momentum.
6.4 Elastic and Inelastic Collisions Momentum and Energy in Completely Inelastic Collisions Moving Target (not in the text) If the target is moving, then conservation of tells us And therefore In this case, it is possible for the final speed to be zero. This simply requires that, pre-collision, the objects had equal and opposite linear momenta.
6.4 Elastic and Inelastic Collisions Momentum and Energy in Elastic Collisions For an elastic collision, both linear momentum and kinetic energy are conserved. We will only consider 1D collisions. Since the objects do not stick together in this case, they will have different final speeds, and . Using the symbols shown in the figure (if you don’t like the idea of the masses moving in the same direction pre-collision, just remember that can be negative), we can write P conservation: K conservation:
6.4 Elastic and Inelastic Collisions If we know the masses initial speeds, these two equations can be solved (pp. 199-200) to produce the final speeds: Stationary Target If is initially stationary, we can still use the above equations, which are simplified by setting :
6.4 Elastic and Inelastic Collisions In the case that the masses are equal, the preceding equations tell is that after the collision, and . In other words, the objects completely exchange both linear momentum and kinetic energy. A perfect example of this is the head-on collision of two curling rocks. If (a “massive projectile”), then and . That is, the projectile is slowed down just a tiny bit, while the target acquires a speed nearly twice that of the projectile. This would be the case of a tee shot in golf…if you do the math (2D projectile motion with air resistance), you’ll find that the speed with which a golfer can swing his club is insufficient to produce a >250-yard drive. However, since the ball is much less massive than the head of the driver, the ball’s speed off of the tee is roughly twice the speed of the club head, allowing it to travel a great distance.
6.4 Elastic and Inelastic Collision Finally, if (a “massive target”), then and . Here, the projectile essentially just bounces backward off of the target, while the target gets a slight nudge forward (physically, why must the target attain at least a tiny forward velocity)?
6.4 Elastic and Inelastic Collisions The short video shown here illustrates concepts of momentum conservation (in 2D) as it relates to the sport of curling. There’s some interesting information about friction as well. Videos are not embedded into the PPT file. You need an internet connection to view them.
Problem #1: Inelastic Collision WBL LP 6.11
Problem #2: 2D Completely Inelastic Collision WBL Ex 6.65 Two balls approach each other as shown in the figure, where m = 2.0 kg, v = 3.0 m/s, M = 4.0 kg, and V = 5.0 m/s. If the balls collide and stick together at the origin, What are the components of the velocity v’ of the balls after the collision? What is the angle? Solution: In class
Problem #3: Ballistic Pendulum WBL Ex 6.55 A ballistic pendulum is a device used to measure the velocity of a projectile – for example, the muzzle velocity of a rifle bullet. The projectile is shot horizontally into, and becomes embedded in, the bob of a pendulum. The pendulum swings upward to some height h, which is measured. The masses of the block and bullet are known. Show that the initial velocity of the projectile is given by Solution: In class
6.5 Center of Mass In the last lecture, we learned that there is a well-defined relation between the net force acting on a system of particles and the rate at which the system’s total momentum changes over time (they’re equal: ). Now, let’s derive a method of keeping track of the position/velocity of an entire system of particles. In this case, note that an extended object (that is, an object with an actual shape and size, rather than the “point particles” we’ve been discussing all semester) is really just a system of a very large number of particles. As the system’s position evolves by Newton’s laws, it is important to note that each particle in the system can move with a different trajectory. An example will be discussed in class.
6.5 Center of Mass Our discussion relies on the concept of the center of mass: What this means is that, while the motion of any individual particle in a system may be complicated, the CM follows a simple path, dictated by the physics of chapter 4. The photo below provides an example. the center of mass (CM) is the point at which all of the mass of an object or system may be considered to be concentrated, for the purposes of describing its linear or translational motion only
6.5 Center of Mass Once the CM is known, we can rewrite Newton’s 2nd law to describe its motion: Here, is the net external force on the system (internal forces exist in Newton’s 3rd-law force pairs and thus sum to zero). is the mass of the entire system, and is the acceleration of the CM. Using the same derivation as in the last lecture, we also have an equivalent alternate form of Newton’s 2nd law:
6.5 Center of Mass Consider a system consisting of a number of particles that are arranged in a straight line (i.e. in one dimension). The particles have masses and positions . The CM is located at position Or, in summation notation, That is, the CM is a weighted average of the positions of each individual particle (with the weights being the particle’s masses). If the particles are located in 2 or 3 dimensions, then we similarly have ,
6.5 Center of Mass For 2-particle systems, we can make a couple of observations about the CM. First, if the two masses are identical (, then In other words, the CM will lie midway between the two masses. On the other hand, suppose that (for example, is the Earth and is the moon). Then, let’s place the origin at the position of (i.e In this case, The CM is much closer to the more massive particle, only extending toward the less massive one by a factor of m2 / m1.
6.5 Center of Mass Finding the CM for an extended object (such as the wrench from a few slides ago) is much more complicated. In general, it requires integration, so it will not be covered in PC141. However, for extended objects with certain degrees of symmetry, the CM simply lies at the point / line / plane of symmetry. For instance, the CM of a meter-stick lies at exactly the 50-cm mark (and exactly halfway through the width and thickness of the stick, if you want to consider it as a 3D object). The CM of a 2D square or circle, or of a 3D sphere or cube, lies at the exact center of the object. The text describes the CM as the “balance point” of the system. Unfortunately, we don’t quite know enough physics to understand why something would or would not be balanced, so we’ll return to this later in the course.
6.5 Center of Mass For irregularly shaped objects, the CM can be found experimentally, using a suspension technique illustrated in the text. Finally, it is important to note that it is possible for the CM to exist at a point where no mass exists. This is illustrated below.
Problem #4: Center of Mass WBL LP 6.15
Problem #5: Sun-Earth System The sun’s mass is , and the Earth’s mass is On average, they are separated by a distance of If we place the origin (x = 0) at the center of the sun, how far from the origin is the CM of the sun-earth system? • Solution: In class
Problem #6: Three Point Masses Three particles with masses m1 = 1.2 kg, m2 = 2.5 kg, and m3 = 3.4 kg form an equilateral triangle of edge length a = 140 cm. Where is the center of mass of this system? • Solution: In class
Problem #7: Solid Plate The figure shows a slab with dimensions d1 = 11.0 cm, d2 = 2.80 cm, d3= 13.0 cm. Half of the slab consists of aluminum (density = 2.70 g/cm3) and the other half consists of iron (density = 7.85 g/cm3). What are the coordinates of the slab’s center of mass? • Solution: In class
Problem #8: Elastic Collision A body of mass 2.0 kg collides elastically with a stationary body and continues to move in the original direction but with one-fourth of its original speed. • What is the mass of the other body? • What is the speed of the two-body center of mass if the initial speed of the 2.0 kg body was 4.0 m/s? • Solution: In class
6.6 Jet Propulsion and Rockets (time permitting) Linear momentum conservation (and Newton’s 3rd law) dictate that when an object expels part of its mass in one direction, the remainder of the mass must gain velocity in the opposite direction. A good example of this is the recoil of a rifle:
6.6 Jet Propulsion and Rockets (time permitting) This principle is put to good use during jet propulsion. Here, burning fuel produces exhaust products (gases) that are directed backwards at high speed (maximizing the speed of the exhaust is a formidable engineering problem…it literally requires the expertise of rocket scientists). The result is a forward-directed force on the aircraft, referred to as thrust. The basic mathematics involved with jet propulsion isn’t too tricky, but it does involve integration, so we’ll avoid it altogether. It’s just nice to know that something as complex as space travel is essentially governed by one month’s worth of introductory physics.