Download
1 / 27
270 likes | 296 Views
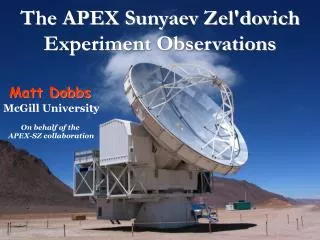
Dirk Muders Max-Planck-Institut f ür Radioastronomie Bonn. ACS at the Atacama Pathfinder Experiment (APEX). The APEX Project. APEX is a 12m radio telescope located north of the ALMA site on Chajnantor at 5100m

E N D
Dirk Muders Max-Planck-Institut für Radioastronomie Bonn ACS at the Atacama Pathfinder Experiment (APEX)
The APEX Project • APEX is a 12m radio telescope located north of the ALMA site on Chajnantor at 5100m • APEX is a pathfinder mission aimed at exploring the southern sub-mm sky in preparation for ALMA • APEX is a collaboration between MPIfR, AIRUB, ESO and OSO
The APEX Project (cont.) • APEX is a copy of the US ALMA prototype antenna built by VERTEX • Compared to the ALMA telescope APEX features two additional Nasmyth receiver cabins, an instrument container and a compressor platform
APEX Interfaces • APEX uses the same vendor-supplied control computers (ACU & PTC) and the same CAN bus interface (ICD 9) like ALMA • It was thus decided to re-use the ALMA prototype telescope control software (TICS) and most of the corresponding control hardware setup
APEX Instrumentation • The APEX instrumentation will consist of: • Bolometer cameras with several hundred pixels (e.g. LABOCA) at λ=1 mm to 350 μm • Heterodyne receivers (single-pixel and arrays) at ν=230 GHz to 1.5 THz (200 μm) • Continuum backends • Auto-Correlators
APEX Status • APEX has been erected in early 2003 • In September 2003 the telescope control system hard- and software were installed • Preliminary acceptance tests took place in November 2003 • Currently the pointing is being checked with an optical telescope
Difficulties at 5000m: Low pressure Low oxygen content Oxygenization Pressurized Hard DriveBox
ACS / TICS at APEX • APEX is using TICS and thus ACS • The ACS version in use is determined by TICS (currently ACS 2.0.1) • We will probably upgrade to ACS 3.0.1 this year if a new (stable) TICS port will be available
ACS / TICS at APEX (cont.) • TICS provides antenna control (astronomical coordinate tracking, patterns, CAN bus access, etc.) via 4 COBs • ALMA's timing setup is much more complicated than needed for APEX • APEX uses GPS & IRIG-B to slave the ABM to TAI and a hardware timing generator for the 48ms Timing Events
APEX Instrument Interfaces • APEX instrumentation needs to be interfaced to the ACS -> make components • Many instruments are legacy devices that use a simple ASCII protocol over a socket rather than the CAN bus that ALMA employs • Thus a socket DevIO implementation is needed
APEX Socket DevIO • The socket code needs to handle sending and parsing ASCII messages for component properties AND for methods • It must handle multiplexing and concurrent accesses to the component properties • The messages are standardized using the SCPI syntax
SCPI Syntax Component sends the device: [APEX:]<device name>:<property/method name>? The device replies: [APEX:]<device name>:<property/method name> <value> \ <ISO 8601 time stamp> Example: APEX:SIS345:LO2:MULTI1:backShort2? APEX:SIS345:LO2:MULTI1:backShort2 2.341 \ 2003-11-05T10:19:38.310+00.00
APEX Instruments IDLs • The instrument IDLs are kept as generic as possible to be able to re-use them for new instruments of the same kind; only a new CDB entry is needed • Instruments are implemented via a hierarchical device tree to: • have one high-level interface for observing • have low-level interface(s) for engineering
APEX Device Hierarchy APEX:SIS345 apexHFE.idl APEX:SIS345:CALUNIT apexHFE_HCal.idl APEX:SIS345:MIXER1 apexHFE_Mixer.idl APEX:SIS345:MIXER1:COLDAMP apexHFE_ColdAmp.idl APEX:SIS345:MIXER2 apexHFE_Mixer.idl APEX:SIS345:MIXER2:COLDAMP apexHFE_ColdAmp.idl APEX:SIS345:LO1 apexHFE_LO.idl APEX:SIS345:LO1:GUNN apexHFE_Gunn.idl APEX:SIS345:LO1:PLL apexHFE_PLL.idl APEX:SIS345:LO1:MULTI1 apexHFE_Multi.idl APEX:SIS345:LO1:MULTI2 apexHFE_Multi.idl APEX:SIS345:LO2 apexHFE_LO.idl APEX:SIS345:LO2:GUNN apexHFE_Gunn.idl APEX:SIS345:LO2:PLL apexHFE_PLL.idl APEX:SIS345:LO2:MULTI1 apexHFE_Multi.idl APEX:SIS345:LO2:MULTI2 apexHFE_Multi.idl
Code generation • The C++ component code is automatically generated from the IDLs using a modified version of the “bdsGenerator” from AIRUB • C++, *.h, xml and xsd files are created • DevIOUDPSock socket communication code & SCPI commands are automatically added • Embedded system host name and port are stored in the CDB and read at startup
Serial & GPIB Devices • Many commercial devices use RS232 or GPIB communication with given commands • General problem of non-concurrent access -> need to serialize commands • Demultiplexing is done in the standalone SCPI command parser (CID) which in turn talks to the hardware, i.e. CID is a “driver” • Socket DevIO is re-used here
Device Emulators • A simple Python script was developed to emulate socket devices • The emulator uses the IDLs and sets up all property types automatically • Simple funtionality such as setting actual to commanded values is included • Can be extended easily
APEX Control System (APECS) • For real observations all those components need to be set up and coordinated to perform “scans”. This is done by the “APEX Observing Engine” • The APEX raw data format (MBFITS) was defined based on ALMA's TI-FITS • The raw data writer collects telescope and backend data to write MBFITS files
APECS (cont.) • APECS uses ACS to provide the necessary infrastructure to observe with APEX: • Observer CLI & GUI to set up scans for a number of standard observing modes • Telescope control (via TICS) & device setup • Raw data (MBFITS) writing • Online calibration (TA*) and data reduction for pointing, focus and skydip
ACS Pros • Hides many CORBA details • Allows for flexible distributed systems • Simple deployment reconfiguration • Component property model is very useful for hardware device implementations • Remote monitoring and remote observing is easily implemented
ACS Cons • Steep learning curve; lab staff typically does not want to deal with it directly • ACS is pretty large; this conflicts with using it in embedded systems • TCP connections get stuck when parts of the software need to be restarted • Missing connection to existing lab tools such as LabView
APEX's ACS Wishlist • Auto-reconnection does not always work but is essential for operations • Rather get a stable and debugged ACS than new features since ACS is the infrastructure for everything else • Share IDL and naming structure with other projects to facilitate re-using code