Download
1 / 19
190 likes | 227 Views
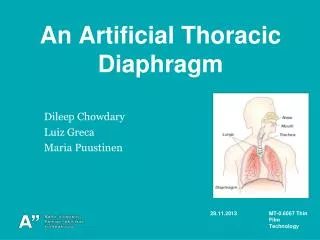
Project team led by Jonathan, Jenna, and Matt aimed to develop a robotic limb accurately simulating human finger movements. The design includes reliable air muscles, control system, and materials for realistic finger motions. Testing showed successful flexion and abduction with room for future improvements.

E N D
Jonathan Kasper Project Manger (ME) Jenna Fike Lead Engineer (EE) Matt Lewis Design Lead (ME) Josa Hanzlik Mechanical Engineer Ellen Cretekos Mechanical Engineer Nick Rappa Mechanical Engineer Eric Giang Electrical Engineer Mark McKann Mechanical Engineer P08023: Air Muscle Artificial Limb Sponsor: Dr. Kathleen Lamkin-Kennard SDIIProjectReviewRev-.doc
P08023: Project Description • Project Statement: • “Develop a Scalable Robotic Limb that Accurately Models All Degrees of Freedom of Human Fingers.” • Market: RIT Biomechanical Program • Showcase for New Technology • Key High Level Needs / Engineering Specs • Realistic Finger Motions 4 DOF in Fingers # Tendons, # Muscles • Reliability Finger Displacement, +/- 3% • Low Cost Air Muscle = $3 approx. • Control Repeatability Supplied Air Pressure 60 psi. • Reliability & Serviceability Air Muscle Life Span SDIIProjectReviewRev-.doc
Design/Build Concept Summary • Hand Material • Fasteners • Tendon Cable • Tendon Hardware • Return Ligament Cable • Pneumatic Fittings SDIIProjectReviewRev-.doc
Air Muscle Concept Summary • Mesh Material • Tube Material • Air Side Connector • Plug SDIIProjectReviewRev-.doc
Controls Concept Summary • Control Software • Data Acquisition System • Relay Board • Valves • Feedback Sensor SDIIProjectReviewRev-.doc
P08023: System Architecture LabVIEW DAQ Pressure Valves Air Muscles SDIIProjectReviewRev-.doc Artificial Hand
P08023: Final Design SDIIProjectReviewRev-.doc
Design/Build Summary Aluminum Berkley Steelon Wire Elastic Shock Cable Standard Rubber Band Push-to-Connect Fitting Cotter Pins Berkley Cable Hardware SDIIProjectReviewRev-.doc
Air Muscle Summary Push-to-Connect Fitting PET Mesh 1/8” ID Rubber Tube Eye Hook SDIIProjectReviewRev-.doc
Controls Summary Linear Potentiometer DAQ Solenoid Valves Relay Board SDIIProjectReviewRev-.doc
Air Muscle Testing Results • Abduction/Adduction 2.5in • Flexion 7in • Preload variability is less then manufacturing variability • Applied preload will not effect air muscle output SDIIProjectReviewRev-.doc
Oh No You D’nt SDIIProjectReviewRev-.doc
WOW SDIIProjectReviewRev-.doc
System Testing • Each finger was tested to verify flexion and ab/adduction motions: • Individual Flexion • Cycling Flexion (x 20) • Individual Abduction • Cycling Abduction (x 20) • Individual Adduction • Cycling Adduction (x 20) • Consecutive Motion Flexion • Consecutive Motion Abduction • Consecutive Motion Adduction • Incremental Flexion Motion SDIIProjectReviewRev-.doc
Test Results • No finger breakage was observed • No strain on finger/ligament/muscle • Smooth incremental movement • No abnormal delays between interface and actuation • Fingers do not contact palm • Fingers collide, does not affect motion SDIIProjectReviewRev-.doc
Project Evaluation • Successes: • Fluid motion of finger extension • Incremental flexion motion achievable within 7% • Ease of serviceability • Shortcomings: • Simultaneous manipulation of fingers not possible • Collisions between fingers • Fingers do not contact palm SDIIProjectReviewRev-.doc
Future Work • Addition of Pinky and Thumb • Finger Design Improvement • Manipulation of Multiple Fingers Simultaneously • Integrated Grasping Capability • Tactile Feedback • Reduced Air Muscle Variability • Extended Air Muscle Life SDIIProjectReviewRev-.doc
Dr. Kathleen Lamkin-Kennard Mr. John Wellin Mr. Scott Kennard Dr. Steven Day Dr. Matthew Marshall Mr. William Scarbrough RIT New Faculty Development Grant Mr. Edward Hanzlik Mr. David Hathaway Dr. Mark Kempski Mr. Robert Kraynik Mr. Steven Kosciol Mr. Jonathan Niebielski. Special Thanks