Download
1 / 51
510 likes | 680 Views
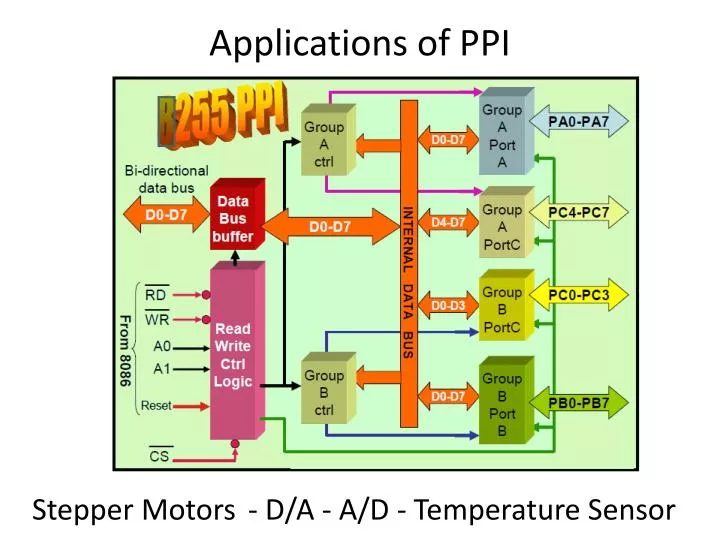
Applications of PPI. Stepper Motors - D/A - A/D - Temperature Sensor. Stepper Motors. More accurately controlled than a normal motor allowing fractional turns or n revolutions to be easily done Lower speed, and lower torque than a comparable D.C. motor

E N D
Applications of PPI Stepper Motors - D/A - A/D - Temperature Sensor
Stepper Motors • More accurately controlled than a normal motor allowing fractional turns or n revolutions to be easily done • Lower speed, and lower torque than a comparable D.C. motor • useful for precise positioning for robotics • Servomotors require a position feedback signal for control
Stepper Motor Step Angles SPS: Steps per second SPS = (RPM * SPR) /60
Stepper Motor Types • Variable Reluctance • Permanent Magnet
Variable Reluctance Motors • This is usually a four wire motor – the common wire goes to the +ve supply and the windings are stepped through • The current example is a 30o motor • The rotor has 4 poles and the stator has 6 poles • Example
Stable State Transient State 1 0 2 25 3 4 30 50 5 6 75 60
Variable Reluctance Motors • To rotate we excite the 3 windings in sequence • W1 – 1 0 0 1 0 0 1 0 0 1 0 0 1 001001001001 • W2 – 0 1 0 0 1 0 0 1 0 0 1 0 0 100100100100 • W3 – 0 0 1 0 0 1 0 0 1 0 0 1 0 010010010010 • 0 30 60 90 120 150 180 210 240 270 300 330 360 30 • This gives two full revolutions
Half Cycle Stepping 0 15 30 45 60 75 90 105
Unipolar Motors (Full) • To rotate we excite the 2 windings in sequence • W1a – 1 0 0 0 1 0 0 0 1 0 0 0 1000100010001 • W1b – 0 0 1 0 0 0 1 0 0 0 1 0 0010001000100 • W2a – 0 1 0 0 0 1 0 0 0 1 0 0 0100010001000 • W2b – 0 0 0 1 0 0 0 1 0 0 0 1 0001000100010 • 0 30 60 90 120 150 180 210 240 270 300 330 360 • This gives two full revolutions
Unipolar Motors (Half) • The two sequences are not the same, so by combining the two you can produce half stepping • W1a – 1 1 0 0 0 0 0 1 1 1 0000011100000111 • W1b – 0 0 0 1 1 1 0 0 0 0 0111000001110000 • W2a – 0 1 1 1 0 0 0 0 0 1 1100000111000001 • W2b – 0 0 0 0 0 1 1 1 0 0 0001110000011100 • 0 15 30 45 60 75 90 105 120 145 150
Enhanced Waveforms (Full) • better torque • more precise control
Unipolar Motors (Enhanced Full) • To rotate we excite the 2 windings in sequence • W1a - 1100110011001100110011001 • W1b - 0011001100110011001100110 • W2a - 0110011001100110011001100 • W2b - 1001100110011001100110011 • This gives two full revolutions at 1.4 times greater torque but twice the power
Motor Control Circuits • For low current options the ULN200x family of Darlington Arrays will drive the windings direct.
Example (Enhanced Full) Required Sequence: 1100 – 0110 – 0011 - 1001
Mode 0 • Provides simple input and output operations for each of the three ports. • No “handshaking” is required, data is simply written to or read from a specified port. • Two 8-bit ports and two 4-bit ports. • Any port can be input or output. • Outputs are latched. • Inputs are not latched
Mode 1 Basic functional Definitions: • Two Groups (Group A and Group B). • Each group has one 8-bit data port and one 4-bit control/data port. • The 8-bit data port can be either input or output. Both inputs and outputs are latched. • The 4-bit port is used for control and status of the 8-bit data port.
Mode 1 – Control Signals • Output Control Signal Definition • OBF (Output Buffer Full F/F). (C7 for A, C1 for B) • The OBF output will go “low” to indicate that the CPU has written data out to the specified port. • A signal to the device that there is data to be read. • ACK (Acknowledge Input). (C6 for A, C2 for B) • A “low” on this input informs the 8255 that the data from Port A or Port B has been accepted. • A response from the peripheral device indicating that it has read the data. • INTR (Interrupt Request). (C3 for A, C0 for B) • A “high” on this output can be used to interrupt the CPU when an output device has accepted data transmitted by the CPU.
Mode 1 – Control Signals • Input Control Signal Definition • STB (Strobe Input). (C4 for A, C2 for B) • A “low” on this input loads data into the input latch. • IBF (Input Buffer Full F/F) (C5 for A, C1 for B) • A “high” on this output indicates that the data has been loaded into the input latch; in essence, an acknowledgement from the 8255 to the device. • INTR (Interrupt Request) (C3 for A, C0 for B) • A “high” on this output can be used to interrupt the CPU when an input device is requesting service.
MODE 2 Basic Functional Definitions: • Used in Group A only. • One 8-bit, bi-directional bus port (Port A) and a 5-bit control port (Port C). • Both inputs and outputs are latched. • The 5-bit control port (Port C) is used for control and status for the 8-bit, bi-directional bus port (Port A).
Mode 2 • Output Operations • OBF (Output Buffer Full). The OBF output will go low to indicate that the CPU has written data out to port A. • ACK (Acknowledge). A low on this input enables the tri-state output buffer of Port A to send out the data. Otherwise, the output buffer will be in the high impedance state. • Input Operations • STB (Strobe Input). A low on this input loads data into the input latch. • IBF (Input Buffer Full F/F). A high on this output indicates that data has been loaded into the input latch.