Download

1 / 28
280 likes | 389 Views
Lunar Exploration Transportation System (LETS). MAE 491 / 492 2008 IPT Design Competition Instructors: Dr. P.J. Benfield and Dr. Matt Turner Team Frankenstein Final Review Presentation 4/29/08. Team Disciplines. The University of Alabama in Huntsville Team Leader: Matt Isbell

E N D
Lunar Exploration Transportation System (LETS) MAE 491 / 492 2008 IPT Design Competition Instructors: Dr. P.J. Benfield and Dr. Matt Turner Team Frankenstein Final Review Presentation 4/29/08
Team Disciplines • The University of Alabama in Huntsville • Team Leader: Matt Isbell • Structures: Matthew Pinkston and Robert Baltz • Power: Tyler Smith • Systems Engineering: Kevin Dean • GN&C: Joseph Woodall • Thermal: Thomas Talty • Payload / Communications: Chris Brunton • Operations: Audra Ribordy • Southern University • Mobility: Chase Nelson and Eddie Miller • ESTACA • Sample Return: Kim Nguyen and Vincent Tolomio
Overview • Communications • Payload • Power • Thermal • Risk Management • Conclusions • Questions • Mission Statement • The Need • The Solution • Performance • Schedule • Operations • Structures • GN&C
Mission Statement • To provide NASA with a reliable and multi-faceted lander design that will provide the flexibility to conduct CDD requirements, scientific investigations, and technology validation tasks at different areas on the moon
The Need • Only 6% of lunar surface explored • Apollo missions • Only orbital visits since Apollo • Mobile lunar laboratory with return capabilities is vital to the exploration and understanding of the lunar surface • The lunar surface is an unexploited record of the history of the solar system • Sample polar sites and crater floors
The Solution Cyclops • Lander/Rover • Penetrators • RTG
Operations 1. 5km 2. Deploy Penetrators 3-4. Decent 5. Land 6. Release Propulsion System 7. Rove To Edge of Crater Penetrators 2.5km Cyclops 1.6km
Operations • Launch - September 30, 2012 • Arrive at moon - October 6, 2012 • Operations start 5km from lunar surface • October 8, 2012 • Decent • Shoot 15 penetrators into Shackleton Crater for dark region sampling • Landing • Drop off “single site box” to accomplish single site goals • October 9, 2012 • Rove to rim of Shackleton Crater • October 11 - 18, 2012 • Receive all data from penetrators • October 19, 2012 • Relay all data from penetrators to LRO for transmission to Mission Control • 5 orbits needed
Operations • October 22, 2012 – March 4, 2013 • Rove to, collect and relay data from 29 lighted sites • March 5 – March 7, 2013 • Rove to, collect sample, and launch SRV • March 8 – July 22 • Rove to, collect and relay data from Lighted sites 30 - 59 • July 23 – 25 • Rove to rim of Shackleton crater • July 26 – September 27 • Rove to, collect and relay data from Dark Sites (if penetrators fail) • September 30, 2013 • System Shut Down
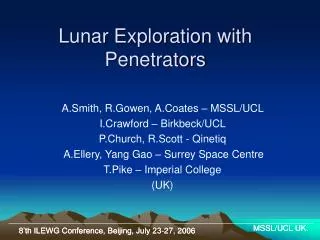
Structures • System Specifications (Auxiliary Systems) • Penetrator Ring Platform • Outer Diameter- 3.189 m. • Aluminum Construction (6061 T6) • Mounted penetrators (spring released at a 4 degree dispersion angle) • Attitude Control • Main thrusters- MR 80B • Attitude Control Thrusters- MR 106 • Hydrazine Tank x 2- 0.549 m. Outer Diameter • Aluminum Frame (6061 T6) • Single Site Box • Max Box Dimensions – 1.54 x 0.688 x 0.356 m. • Integrated Sample Return Vehicle Attitude Control System Cyclops Penetrator Ring Platform
Structures Before Deployment • System Specifications (Main) • Main Chassis • Dimensions – 1.54 x 1.54 x 0.356 m. • Aluminum Frame (6061 T6) • Carbon composite exterior • MLI Insulation • 6 Wheel Passive Rocker Bogie Mobility System • Proven Transportation Platform (MER, Pathfinder) • 0.33 m. Outer Diameter Wheels • Can navigate up to a 45 degree angle • Max speed of 90 m/hr. • Aluminum construction (6061 T6) • Maxon EC 60 Brushless DC motor (60mm) x 6 • Maxon EC 45 Brushless DC motor (45mm) x 8 • Camera • (SSI) Dimensions – 0.305 x 0.203 x 0.152 m. • Scoop Arm • Max Reach- 1.727 m. After Deployment
Structures Wheel Motors Steering Motors • Maxon 60mm EC 60 x 6 • Nominal torque 830 mNm • Maxon 45mm EC 45 x 8 • Nominal torque 310 mNm
GN&C • Decent/Landing • A LIDAR system will be used to control, navigate, and stabilize while in descent • Post Landing • An operator at mission control will manually navigate lander/rover • A Surface Stereo Imager (SSI) periscopic, panoramic camera will be used to survey the lunar surface, provide range maps in support of sampling operations, and to make lunar dust cloud measurements
GN&C • Descent Imaging • A Mars Descent Imager (MARDI) will be used to view both the penetrator dispersion and the landing/descent of the Cyclops • Processor • A BAE RAD750 will be used for all controls processing
Communications • Rover • Parabolic Dish Reflector Antenna (PDRA) • T-712 Transmitter • Communication Bandwidth : X-band • Data Transmission Rate: 150 Mbps • Data Storage Capacity: 10 Gb • Penetrators • Omnidirectional Antenna • Communication Bandwidth: S-band • Data Transmission Rate: 8 Kbps • Data Storage Capacity: 300 Mb
Communications/Payload • Single Site Box (SSB) • Determines lighting conditions every 2 hours for one year, micrometeorite flux, and assess electrostatic dust levitation • Omnidirectional Antenna • Communication Bandwidth: S-band • Data Transmission Rate: 8 Kbps • Data Storage Capacity: 1Gb • Surface Stereo Imager (SSI) • Mass: 10 Kg • Dimensions: 155x68.5x35.5 cm • Power: Solar Panel
Payload • Gas Chromatograph Mass Spectrometer (GCMS) • Performs atmospheric and organic analysis of the lunar surface • Mass: 19 Kg • Dimensions: 10x10x8 cm • Power: Rover • Surface Sampler Assembly (SSA) • Purpose is to acquire, process and distribute samples from the moon’s surface to the GCMS • Mass: 15.5 Kg • Dimensions: 110X10X10 cm • Power: Rover
Payload • Penetrators (Deep Space 2 ) • Mission’s main source of data acquisition in the permanent dark regions • Mass (15 Penetrators): 53.58 Kg • Dimensions: 13.6Dx10L cm • Power: 2 Lithium Ion Batteries Each • Miniature Thermal Emission Spectrometer (Mini-TES) • Objective to provide measurements of minerals and thermo physical properties on the moon • Mass: 2.4 Kg • Dimensions: 23.5x16.3x15.5 cm • Power: Rover
Power RTG TRL9 Constant power supply Thermal output can be utilized for thermal systems Lithium-Ion Batteries Commercially available Easily customizable Rechargeable Solar Used for Single Site Box Conventional Increasingly efficient in well light areas
Power • Total Power Required • 643.525 W • Peak Power • Mobility • 342.625 W • Data Collection/Transfer • 276.2 W • Single Sight Box • 7.8 W • RTG • 400 W • Lithium-Ion Batteries • 455 W for both • Solar Cells • 10 W (SSB - Not included in Total) • 33% Contingency Power • Total Power Supplied to Lander • 855 W
Thermal • Cyclops uses three types • Heat transfer pipes • Paraffin heat switches • Radiator heat switches • Diaphragm heat switches • Multi-Layer Insulation
Thermal • Two standard types of switches are used as a redundant check to prevent over heating
Thermal • Heat is well controlled • MLI has low heat absorbance • Heat switches allow close tolerance control
Conclusions • “There’s no place this thing can’t go” • If penetrators fail, remaining mission will not be compromised • Reliable multi-faceted design