Download
1 / 13
130 likes | 263 Views
Sect. 7-3: Work Done by a Varying Force. Work Done by a Varying Force. For a particle acted on by a varying force, clearly is not constant !. For a small distance ℓ i , along the curve, the work done is approximately W i = F i ℓ i cos θ i

E N D
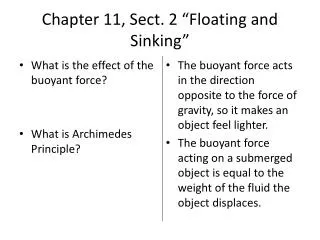
Work Done by a Varying Force For a particle acted on by a varying force, clearly is not constant! For a small distanceℓi, along the curve, the work done is approximatelyWi = Fiℓi cosθi The total work over 7 segments is approximately For a small distance ℓ2 the work done is approximately W2 = F2ℓ2 cosθ2 For a small distanceℓ1along the curve, the work done is approximatelyW1 = F1ℓ1 cosθ1
For a force that varies, the work can be approximated by dividing the distance up into small pieces, finding the work done during each, and adding them up.
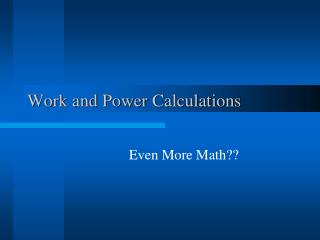
In the limit that the pieces become infinitesimally narrow, the work is the area under the curve, which is the integral of Fcosθ over the distance ℓ Or:
See text for details. Requires that you know simple integral calculus. • In one dimension, for F = F(x), the bottom line is that the work done is the integral of the F vs. x curve: W = ∫F(x) dx (limits xito xf) • For those who don’t understand integrals, this isTHE AREA under the F vs. x curve
Work Done by an Ideal Spring Force An ideal spring is characterized by a spring constant k, which is measure of how “stiff” the spring is. The “restoring force” Fs is: Fs = -kx (Fs > 0, x < 0; Fs < 0, x > 0) This is known as Hooke’s “Law” (but it isn’t really a law!)
Applied Force Fappis equal & opposite to the force Fs exerted by block on spring: Fs = - Fapp = -kx
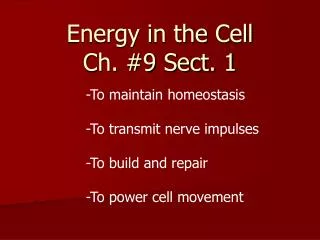
Force Exerted by a Spring on a Block Force Fsvaries with block position x relative to equilibrium at x = 0. Fs = -kx spring constant k > 0 x > 0, Fs < 0 x = 0, Fs = 0 x < 0, Fs > 0 Fs(x) vs. x
Example: Measuring k for a Spring Hang a spring vertically. Attach an object of mass mto the lower end. The spring stretches a distanced. At equilibrium, Newton’s 2nd Law says: ∑Fy = 0 so,mg – kd = 0 or mg = kd If we know m, & measure d, k = (mg/d) Example: d = 2.0 cm = 0.02 m m = 0.55 kg k = 270 N/m
Relaxed Spring Spring constant k x = 0 In (a), the work to compress the spring a distance x: W = (½)kx2 So, the spring stores potential energy in this amount. x W W = (½)kx2 W W In (b), the spring does work on the ball, convertingit’s stored potential energy into kinetic energy. W W
Plot ofF vs. x. The work done by the person is equal to the shaded area.
Example 7-5: Work done on a spring a.A person pulls on a spring, stretching itx = 3.0 cm, which requires a maximum forceF = 75 N. How much work does the person do? b.Now, the person compresses the springx =3.0 cm, how much work does the person do?
Example 7-6: Force as a function of x A robot arm that controls the position of a video camera in an automated surveillance system is manipulated by a motor that exerts a force on the arm. The dependence of the force on the position x of the robot arm is measured & found given by where F0 = 2.0 N, x0 = 0.0070 m, and x is the position of the end of the arm. If the arm moves from x1 = 0.010 m to x2 = 0.050 m, how much work did the motor do?