Download
1 / 15
160 likes | 180 Views
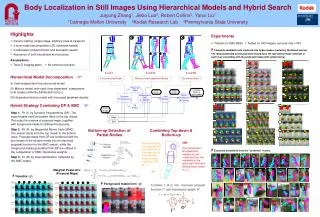
Learn to replace a flexible link in a four-bar mechanism, enabling 360° rotation. Create, link, and add motion to components in MSC.ADAMS. Address potential issues for different solvers.

E N D
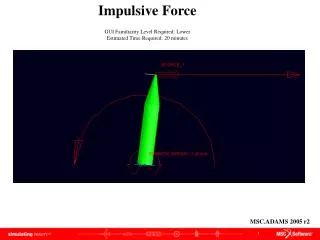
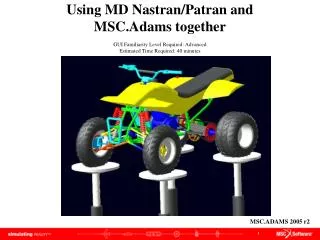
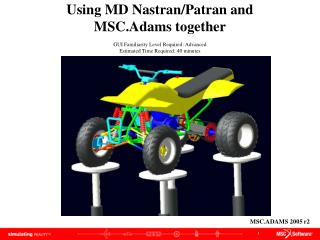
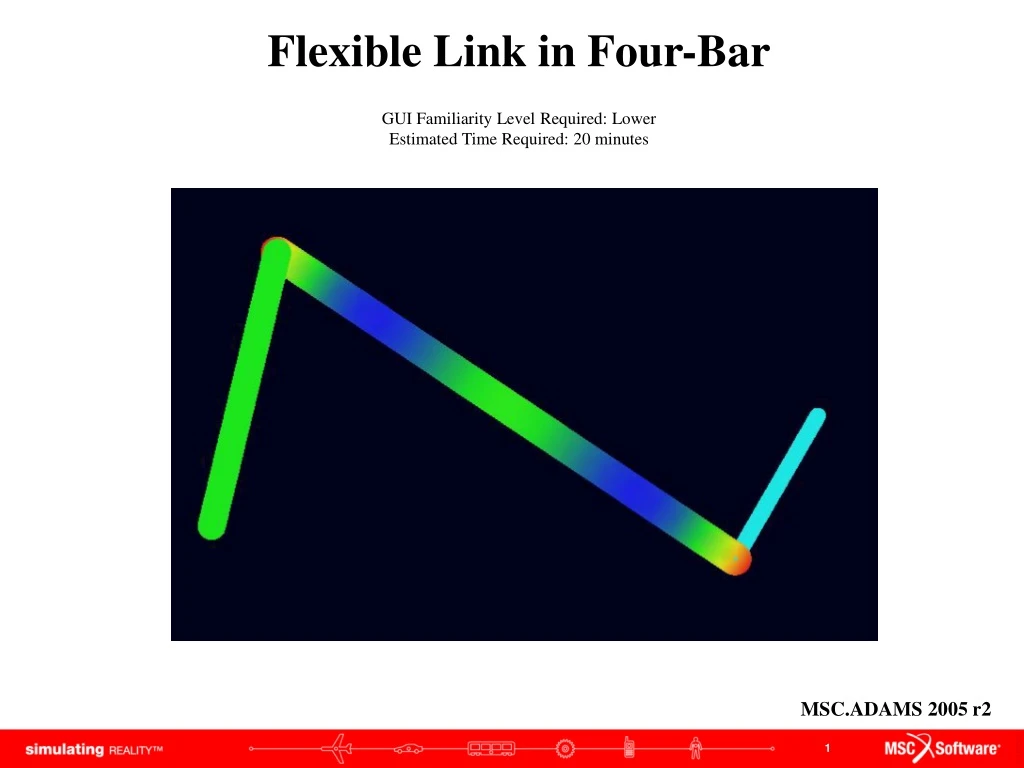
Flexible Link in Four-Bar GUI Familiarity Level Required: Lower Estimated Time Required: 20 minutes MSC.ADAMS 2005 r2
Topics Covered In this tutorial you will learn how to: • Create a Marker • Create a Link • Create a Revolute joint • Add a Motion • Replace a Rigid Link with a Flexible Link • Reposition part If you have any difficulties, import the “flexible_link_shortcut.cmd” file and proceed from pg 10 If you have any difficulties, import the “flexible_four_bar_complete.cmd” file and proceed from pg 13
Flexible Link in Four Bar Problem Replace a flexible link in the four bar mechanism so that the driver link is able to move 360°
What You Should Accomplish If you are successful you should end up with a working ADAMS model that has a flexible link, that has a driver link is able to rotate 360°
Create New Model Getting Started: a. Under the heading "How would you like to proceed", select the Create a new model radio button. b. Choose a Location to save your files c. Choose Model Name as model_1 (default) d. Verify the Gravity text field is set to Earth Normal (-Global Y). e. Verify that the Units text field is set to MMKS - mm,kg,N,s,deg. f. Select OK. a b c d e f
Create Marker • Click on the View menu, select Coordinate Window • Right-click Rigid Body tool stack. Select the Marker tool • Click on the point (-300,0,0) b c a Create Markers at: d. (-250, 250, 0) e. (250, 250, 0) f. (250, 100, 0) d e f
Create Link • Right-click Rigid Body tool stack. Select the Link tool • Click ground.Marker_1 • Click ground.Marker_2 a c b d • Create Link between Marker_2 and Marker_3 • Create Link between Marker_3 and Marker_4 e
Add a Revolute Joint • Right-click on the Joint tool stack in the Main Toolbox, select Joint: Revolute tool. • Set the Construction option menu to 1 Location and Normal to Grid. • Left-click on the marker ground.MARKER_1 . • A joint between the cylinder and the ground is created at that location. a b c d Create a revolute joint at: e.Marker_2 f. Marker_3 g. Marker_4 f e g
Add Motion • Add a rotational motion driver to the revolute joint that specifies a constant cam rotation of one revolution per second. • Select Rotational Joint Motion from the Motion Driver tool stack • In the Speed text field, enter (30.0d) to set the motion displacement to be 30 degrees/second. • Left-click on the Joint_4. a c b
Replacing Rigid Link with Flexible Link • Click Build menu, select Flexible Bodies, select Rigid To Flex • Right-click in Current part text field, select Part Pick • Click on PART_3 b c a • Right click in MNF File text field Click Browse search for link.mnf d
Reposition • Right-click on flexible body, select Flexible_Body: PART_3_flexModify • Click Location button • Enter ({-250.0, 250.0, 0.0} + {0.0, 0.0, 0.0}) in location text field • Click OK a b a c d
Revolute Joint Replace revolute joints at MARKER_2 and MARKER_3, because the joint is not aligned properly when you swap in the flexible link 2 3
Model This is what your screen should look like when your model is complete
Topics Covered In this tutorial you will learn how to: • Create a Marker • Create a Link • Create a Revolute joint • Add a Motion • Replace a Rigid Link with a Flexible Link • Reposition part
Best Practices • Check the position of the links • Check the orientation of the joints • Make sure the joints are correctly connected • Check the orientation of the flexible body • Check the speed of the added motion • For C++ solver this model works fine • For Fortran solver needed to change solver setting, select corrector as “modified” in Dynamics category