Download
1 / 17
170 likes | 297 Views
This lecture is devoted to the first experiment: Backstepping control of PMDC motor.

E N D
This lecture is devoted to the first experiment: Backstepping control of PMDC motor. ECE 893 Industrial Applications of Nonlinear Control Dr. UgurHasirciClemson University, Electrical and Computer Engineering Department Spring 2013
Permanent Magnet DC motors are useful in a range of applications, from battery powered devices like wheelchairs and power tools, to conveyors and door openers, welding equipment, X-ray and tomographic systems, and pumping equipment, to name a few. They are frequently the best solution to motion control and power transmission applications where compact size, wide operating speed range, ability to adapt to a range of power sources or the safety considerations of low voltage are important. Their ability to produce high torque at low speed make them suitable substitutes for gearmotors in many applications. ECE 893 Industrial Applications of Nonlinear Control Dr. UgurHasirciClemson University, Electrical and Computer Engineering Department Spring 2013 www.johnsonelectric.com/en/resources-for.../pmdc-motor.html
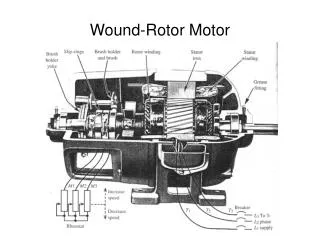
Permanent magnet DC brushed motors (PMDC motors) consist of permanent magnets, located in the stator, and windings, located in the rotor. The ends of the winding coils are connected to commutator segments, that make slipping contact with the stationary brushes. Brushes are connected to DC voltage supply across motor terminals. Change of direction of rotation can be achieved by reversal of voltage polarity. ECE 893 Industrial Applications of Nonlinear Control Dr. UgurHasirciClemson University, Electrical and Computer Engineering Department Spring 2013 http://www.johnsonelectric.com/en/resources-for-engineers/automotive-applications/motion-technology/pmdc-motor.html
In this lecture, we will • design a backstepping controller, • simulate the controller, and • implement the controller • for this type of motors. ECE 893 Industrial Applications of Nonlinear Control Dr. UgurHasirciClemson University, Electrical and Computer Engineering Department Spring 2013
Control Design Dynamic model of the PMDC motor is as follows: mechanical subsystem ECE 893 Industrial Applications of Nonlinear Control Dr. UgurHasirciClemson University, Electrical and Computer Engineering Department Spring 2013 electrical subsystem
mechanical subsystem electrical subsystem By selecting the state variables as ECE 893 Industrial Applications of Nonlinear Control Dr. UgurHasirciClemson University, Electrical and Computer Engineering Department Spring 2013 we get the state-space representation as follows:
ECE 893 Industrial Applications of Nonlinear Control Dr. UgurHasirciClemson University, Electrical and Computer Engineering Department Spring 2013 Control objective is to drive the motor position, x1, to a desired profile x1d , by using the control input signal, u. Note that the control input signal appears at the third state equation while we are trying to stabilize the first state variable, x1. Then the backstepping method is a good tool to design a controller for this system.
In usual way, let’s define the tracking error and investigate its dynamics: ECE 893 Industrial Applications of Nonlinear Control Dr. UgurHasirciClemson University, Electrical and Computer Engineering Department Spring 2013 By adding and subtracting the first virtual control input, Φ1, to the right hand side, and then by defining the first backstepping variable, h1, we get Investigating the dynamics of h1 yields
The procedure can be applied as follows: ECE 893 Industrial Applications of Nonlinear Control Dr. UgurHasirciClemson University, Electrical and Computer Engineering Department Spring 2013
Stability Analysis ECE 893 Industrial Applications of Nonlinear Control Dr. UgurHasirciClemson University, Electrical and Computer Engineering Department Spring 2013 Exponential stability is achieved. A S I T C L S A B
Explicit expression of f : ECE 893 Industrial Applications of Nonlinear Control Dr. UgurHasirciClemson University, Electrical and Computer Engineering Department Spring 2013
2. Simulation of the System ECE 893 Industrial Applications of Nonlinear Control Dr. UgurHasirciClemson University, Electrical and Computer Engineering Department Spring 2013
3. Experiment Acquisition of the Feedback Signals: 1. Current Feedback : We could use a separate current sensor for current feedback but the amplifier in our laboratory has two modes of operation: Controlled Current and Controlled Voltage and it has internal current sensor to be able to operate in Controlled Current Mode. We will use this current sensor for current feedback. In experimental setup, connect the current sensor output of the amplifier to the analog port of the Q4 data acquisition card through a BNC cable. In mdl file to be used in experiment, the output of “Q4 Quanser Analog Input” block will provide current information. The current sensor produces 1V voltage for 10 A current. For this reason, to get a numerical value of the instantaneous current, multiply the output by 10 by using a “Gain” block. ECE 893 Industrial Applications of Nonlinear Control Dr. UgurHasirciClemson University, Electrical and Computer Engineering Department Spring 2013
2. Position and Speed Feedback: PMDC motor used in the experiments has an incremental encoder mounted on its shaft. This incremental encoder produces 400 pulses per revolution. This means that the encoder produces 400 pulses per 2π radian angular displacement. Encoder input of Q4 card counts this pulses. At any time instant of operation, one can find the angular position value as ECE 893 Industrial Applications of Nonlinear Control Dr. UgurHasirciClemson University, Electrical and Computer Engineering Department Spring 2013 To get position feedback, connect the encoder output to the Q4 card encoder input through a 6-pin DIN connector in experimental setup, and use block named “Q4 Quanser Incremental Encoder in your mdl file. For speed feedback, simply differentiate it in the model.
Application of Calculated Voltage Value (Control Signal) to the Motor Assume that your control algorithm calculated the voltage to be applied to the motor as 18 volt at any time instant of operation. One can not apply this voltage value to the motor since the maximum voltage value that can be obtained from a computer-based system is 5 V, and the maximum current value is 20 mA. This is the reason to use an amplifier. The output equation for the amplifier is ECE 893 Industrial Applications of Nonlinear Control Dr. UgurHasirciClemson University, Electrical and Computer Engineering Department Spring 2013 You will need to scale the voltage value calculated by control algorithm. Divide the calculated voltage by (gain×1.8). Use the block named “Q4 Quanser Analog Output” to send voltage information to the Q4 card terminal. By using a BNC cable, connect the analog output of the Q4 card to amplifier input in the experimental setup.
Plotting the Content of a Scope Classical scope block, , is not usable in real time operation. Instead, Target Scope is used. ECE 893 Industrial Applications of Nonlinear Control Dr. UgurHasirciClemson University, Electrical and Computer Engineering Department Spring 2013 Time variation of the signal monitored by this scope can be seen at target pc monitor and also can be plotted by using following syntax in command window. xPC target automatically produces a variable named “tg”. This variable holds the time log and variables log. Following syntax plots the time variation of Target Scope 1 : plot(tg.TimeLog, tg.OutputLog(:,1)) Time information is saved as TimeLog array, and scope information is saved as OutputLog array.
All these connections and setting are already done. If you would like to implement the controller we have designed today, just • download the mdl file posted at course website • go to Riggs 25 (passcode 1495#), • connect the ethernet cable to your laptop (host computer), • plug in the amplifier cable, • turn on the amplifier (amplifier gain is set to 2), • and ENJOY IT ! ECE 893 Industrial Applications of Nonlinear Control Dr. UgurHasirciClemson University, Electrical and Computer Engineering Department Spring 2013