Download
1 / 7
70 likes | 332 Views
living with the lab. Acquiring Data from an ADXL335 Accelerometer. Arduino Uno microcontroller board. DIGIKEY DKSB1002A Evaluation Board 3-axis accelerometer. living with the lab. DKSB1002A Evaluation Board and ADXL335 Accelerometer.

E N D
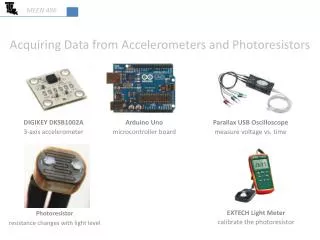
living with the lab Acquiring Data from anADXL335 Accelerometer Arduino Uno microcontroller board DIGIKEY DKSB1002A Evaluation Board 3-axis accelerometer
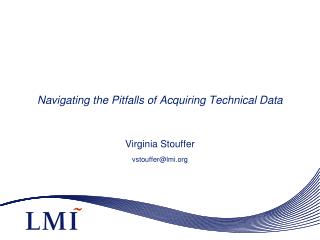
living with the lab DKSB1002A Evaluation Board and ADXL335 Accelerometer • DKSB1002A is a prototyping board purchased for $20 from Digikey • Screw holes for mounting board onto “object of interest” • Board is ~ 20mm square • ADXL335 3-axis accelerometer chip • 3-axis • ±3g this small chip is the ADXL335 accelerometer(this is an older model . . . they are even smaller now) • COM - ground • VSS - power (we will provide 5V) • X - acceleration in x-direction • Y - acceleration in y-direction • Z - acceleration in z-direction z x the DKSB1002A is a board used to evaluate the accelerometer; if you were putting an accelerometer in a device like a cell phone, you would only use the ADXL335 chip (and maybe some capacitors) y
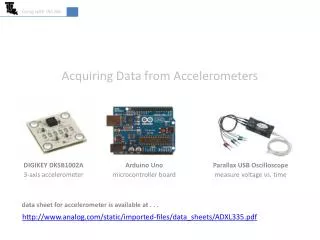
living with the lab Implementing a 3-axis Accelerometer: Wiring to Arduino • COM - ground • VSS - power (we will provide 5V) • X - acceleration in x-direction • Y - acceleration in y-direction • Z - acceleration in z-direction
living with the lab Programming void setup() { Serial.begin(9600); } void loop() { intxaccel = analogRead(0); intyaccel = analogRead(1); intzaccel = analogRead(2); unsigned long timevar = millis(); Serial.print(timevar); Serial.print(" "); Serial.print(xaccel); Serial.print(" "); Serial.print(yaccel); Serial.print(" "); Serial.println(zaccel); } associates a time with each set of accelerations
living with the lab Calibration z x y
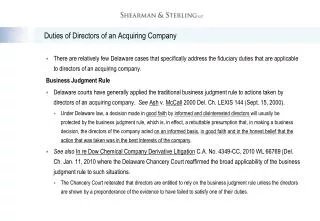
+x qx ax qx 1g (perceived vertical acceleration) living with the lab Angle Measurement z x y θx = asin(ax/g)
living with the lab Example Application The piezospeaker below outputs a frequency that varies with the acceleration in the x-direction. The equation for computing the frequency is chosen so that the device makes an audible noise that varies when rotating or shaking the device. void setup(){Serial.begin(9600); } void loop() { intxaccel = analogRead(0); int freq = 1500+xaccel*2; tone(7,freq); Serial.print(xaccel); Serial.print(" "); Serial.println(freq); }