Download
1 / 8
100 likes | 297 Views
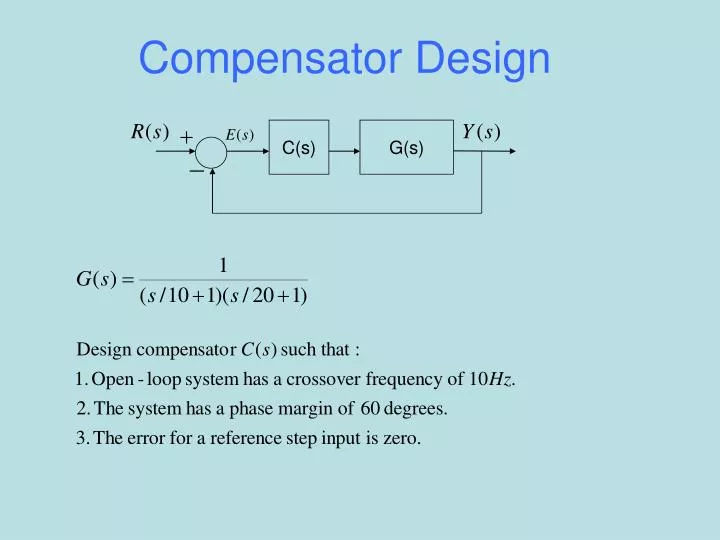
Compensator Design. C(s). G(s). unity=syslin(‘c’,1,1); y=csim('step',t,(h1)/.unity); plot2d(t,y). Lead Compensator. unity=syslin(‘c’,1,1); y=csim('step',t,(h2)/.unity); plot2d(t,y). G(s). G(s). unity=syslin(‘c’,1,1); y=csim('step',t,(h3)/.unity); plot2d(t,y). Home-work. C(s). G(s).

E N D
Compensator Design C(s) G(s)
unity=syslin(‘c’,1,1); y=csim('step',t,(h1)/.unity); plot2d(t,y)
unity=syslin(‘c’,1,1); y=csim('step',t,(h2)/.unity); plot2d(t,y)
G(s) unity=syslin(‘c’,1,1); y=csim('step',t,(h3)/.unity); plot2d(t,y)
Home-work C(s) G(s)