Download
1 / 26
270 likes | 467 Views
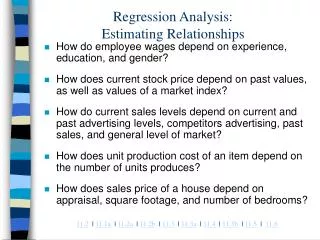
Estimating 2-view relationships. CMPUT 499/615. Fundamental matrix. Epipolar lines: Epipoles: Projection matrices:. [Faugeras ’92, Hartley ’92 ]. Algebraic representation of epipolar geometry. Step 1: X on a plane Step 2: epipolar line l’. F 3x3, Rank 2, det(F)=0

E N D
Estimating 2-view relationships CMPUT 499/615
Fundamental matrix Epipolar lines: Epipoles: Projection matrices: [Faugeras ’92, Hartley ’92 ] • Algebraic representation of epipolar geometry Step 1: X on a plane Step 2: epipolar line l’ • F • 3x3, Rank 2, det(F)=0 • Linear sol. – 8 corr. Points (unique) • Nonlinear sol. – 7 corr. points (3sol.) • Very sensitive to noise & outliers
The projective reconstruction theorem If a set of point correspondences in two views determine thefundamental matrix uniquely, then the scene and cameras may be reconstructed from these correspondences alone, and any two such reconstructions from these correspondences are projectively equivalent allows reconstruction from pair of uncalibrated images!
Upcoming: 2view Reconstuction • Objective • Given two uncalibrated images compute (PM,P‘M,{XMi}) • (i.e. within similarity of original scene and cameras) • Algorithm • Compute projective reconstruction (P,P‘,{Xi}) • Compute F from xi↔x‘i • Compute P,P‘ from F • Triangulate Xi from xi↔x‘i • Rectify reconstruction from projective to metric • Direct method: compute H from control points • Stratified method: • Affine reconstruction: compute p∞ • Metric reconstruction: compute IAC w
Epipolar geometry: basic equation separate known from unknown (data) (unknowns) (linear)
8-point algorithm Solve for nontrivial solution using SVD: Var subst: Now Min Hence x = last vector in V
~10000 ~100 ~10000 ~100 ~10000 ~10000 ~100 ~100 1 Orders of magnitude difference Between column of data matrix least-squares yields poor results ! the NOT normalized 8-point algorithm
Transform image to ~[-1,1]x[-1,1] (0,500) (700,500) (-1,1) (1,1) (0,0) (0,0) (700,0) (-1,-1) (1,-1) the normalized 8-point algorithm normalized least squares yields good results(Hartley, PAMI´97)
the singularity constraint Non-singular F Singular F
the singularity constraint SVD from linearly computed F matrix (rank 3) Compute closest rank-2 approximation
Geometric distance: Gold standard Maximum Likelihood Estimation (= least-squares for Gaussian noise) Initialize: normalized 8-point, (P,P‘) from F, reconstruct Xi Parameterize: (overparametrized) Minimize cost using Levenberg-Marquardt (preferably sparse LM, see book)
Recommendations: • Do not use unnormalized algorithms • Quick and easy to implement: 8-point normalized • Better: enforce rank-2 constraint during minimization • Best: Maximum Likelihood Estimation (minimal parameterization, sparse implementation) Automatic computation of F • Interest points • Putative correspondences • RANSAC • (iv) Non-linear re-estimation of F • Guided matching • (repeat (iv) and (v) until stable)
The envelope of epipolar lines What happens to an epipolar line if there is noise? Monte Carlo n=50 n=25 n=15 n=10
Other entities? Lines give no constraint for two view geometry (but will for three and more views) Curves and surfaces yield some constraints related to tangency
linear triangulation Solve with SVD for nullvector homogeneous inhomogeneous
Linear triangulation Alternative way of linear intersection: • Formulate a set of linear equations explicitly solving for l’s See our VR2003 tutorial p. 26
geometric error possibility to compute using LM (for 2 or more points) or directly (for 2 points)
Geometric error Reconstruct matches in projective frame by minimizing the reprojection error Non-iterative optimal solution (see Hartley&Sturm,CVIU´97)
Optimal 3D point in epipolar plane x1 l1 l1 l2 x1 x2 x2´ x1´ x2 l2 Given an epipolar plane, find best 3D point for (x1,x2) Select closest points (x1´,x2´) on epipolar lines Obtain 3D point through exact triangulation Guarantees minimal reprojection error (given this epipolar plane)
Optimal epipolar plane m1 l2(a) l1(a) m2 • Reconstruct matches in projective frame by minimizing the reprojection error • Non-iterative method Determine the epipolar plane for reconstruction Reconstruct optimal point from selected epipolar plane 3DOF (Hartley and Sturm, CVIU´97) 1DOF (polynomial of degree 6 check all minima, incl ∞)
Reconstruction uncertainty consider angle between rays
Line reconstruction doesn‘t work for epipolar plane