Download
1 / 28
310 likes | 505 Views
Petar Maymounkov ’06 MIT. Geometric Routing, Embeddings and Hyperbolic Spaces. Outline of talk – a little for everybody. Compact routing (a small industry) The problem & summary of prior work New applications = new open problems [M’06] Hyperbolic geometry (crash course)

E N D
Petar Maymounkov ’06 MIT Geometric Routing, Embeddings and Hyperbolic Spaces
Outline of talk – a little for everybody Compact routing (a small industry) The problem & summary of prior work New applications = new open problems [M’06] Hyperbolic geometry (crash course) Greedy (ordinal) embeddings Prior and related work Lower bounds (on Minkowski and hyperbolic dimension) [M’06] Techniques: duality and topology Upper bounds for trees [M’06]
Outline of talk – a little for everybody Compact routing (a small industry) The problem & summary of prior work New applications = new open problems Hyperbolic geometry (crash course) Greedy (ordinal) embeddings Prior and related work Lower bounds (on Minkowski and hyperbolic dimension) Techniques: duality and topology Upper bounds for trees
The problem: Take 1 Space total routing tables size Routing tables Labels Stretch Routing decisions
The problem: Take 2 [Abraham, …’06] Header rewriting allows for loops! Routing table at= encoding of Space = size of encoding of Routing decision is Rewritten header! Header In-port Current node Out-port
The problem: Take 2 Header rewriting allows for loops! Routing table at = encoding of Space = size of encoding of This formulation conceals (or suggests) a lower-bound proof approach by Kolmogorov Complexity! Routing decision is Rewritten header! Current node Out-port Header In-port
Problem variations • Name-dependent vs. name-independent routing • Vertex labels are assigned (in the output) by the routing scheme, vs. • Vertex labels are pre-assigned (in the input) adversarially, respectively • Directed vs. undirected graphs • Every -stretch directed scheme requires -space on some -vertex graph • Prior work • Algorithms … • … run in polynomial, usually quadratic, time • They are heavily combinatorial and are not parallelizable • Lower bounds • Interested in: Lower bounds on space for given stretch • Just keep in mind: Average-case lower bounds are essentially identical to worst-case bounds [Abraham, …’06]
… but modern applications are more demanding! • Large distributed systems • Social networks, P2P systems, adhoc wireless, radio and censor networks • Can have forced connectivity patterns, hence requiring routing schemes • So what else do we want? • Real-world stretch must be constant (think scale-free, high-conductance) • Scheme computation must be distributed and furthermore incremental • Vertex labels must be stable over time, despite dynamic graph changes • Economic considerations require that table sizes be small: • A matter of taste dictates that is too big • Either, table sizes proportional to vertex degrees • Or, all table sizes when conductance is high • For starters: Is existence unreasonable, given the known bounds? • … let’s look inside the lower bound Routing brings security! Algorithmic? Name-independence does the job! Existential? Graceful space distribution
Lower-bound by girth conjecture (Erdös’63) • Theorem [TZ’01]:Every routing scheme for weighted directed graphs with stretch uses space. • Proof: • Let be an -vertex graph of girth and edges (the conjecture) • There are sub-graphs of • Every two of them differ on at least one edge • Hence routes between and must differ on the two sub-graphs • Therefore we need space-per-graph to even differentiate all corresponding schemes • … the proof really says: • Connotation:Every routing scheme for weighted directed graphs with stretch uses space.
Lower-bound by girth conjecture (Erdös’63) • Theorem [TZ’01]: Every routing scheme for weighted directed graphs with stretch uses space. • Proof: • Let be an -vertex graph of girth and edges (the conjecture) • There are sub-graphs of • Every two of them differ on at least one edge • Hence routes between and must differ on the two sub-graphs • Therefore we need space-per-graph to even differentiate all corresponding schemes • … the proof really says: • Connotation: Every routing scheme for weighted directed graphs with stretch uses space. A harder argument, but with the same connotation, based on Kolmogorov Complexity avoids the girth conjecture! [Abraham,…’06]
So existence is plausible … what about algorithmics? • Incremental algorithms … • … are usually force-simulation (e.g. rubber-bands [Linial, …’86], sphere packings [Nurmela’97], unfolding rigid links [Demaine], etc.) • or Markov iteration (e.g. PageRank) • Geometry fits the bill for force-simulation! • Greedy embeddings and greedy routing • Idea: embed vertices in some nice geometric space and route greedily w.r.t. geometric locations • A greedy embedding is such that it holds that has a neighbor with • Good news: graceful space distribution comes almost [M’06] for free • Each vertex stores the -bit coordinates of its neighbors amounting to a routing table of size • OK, so the plan is …
So existence is plausible … what about algorithmics? • Incremental algorithms … • … are usually force-simulation (e.g. unfolding rigid links [Demaine]) • or Markov iteration (e.g. PageRank) • Geometry fits the bill for force-simulation! • Greedy embeddings and greedy routing • Idea: embed vertices in some nice geometric space and route greedily w.r.t. geometric locations • A greedy embedding is such that it holds that has a neighbor with • Good news: graceful space distribution comes almost [M’06] for free • Each vertex stores the -bit coordinates of its neighbors amounting to a routing table of size • OK, so the plan is … Note that our motivation of greedy embeddings is purely theoretical, whereas [Papadimitriou, …’05] are motivated by empirical observations.
And b.t.w. recent talks by Karp and Papadimitriou fit right here • Here’s where things are going: • Existing routing algorithms … [Thorup,…01], etc. • … almost invariably look like this: • A tree-cover is obtained, such that all vertices belong to few trees • To route, a vertex chooses the best tree (from the cover) • Then, routes with respect to this tree using optimal routing for trees • Our goal will be to match the last step (in an incremental and graceful manner) [M’06] • But we will also derive a unified lower-bounds for all graphs by topology[M’06] • Unusual geometric and optimization open questions will follow [M’06] • Prior work on greedy embeddings … [R. Kleinberg’07] • … reveals that hyperbolic spaces are perfect for routing on trees • But this is “almost obvious” anyway, so what’s the catch? • Why not just use ultra-metrics? • The catch is that hyperbolic spaces accommodate concise embeddings [M’06] • And, they have degrees of freedom to allow “rapidly-mixing” force-simulation [M’…] Marriage between topology and ordinal embeddings? Because they require -space!
Outline of talk – a little for everybody Compact routing (a small industry) The problem & summary of prior work New applications = new open problems Hyperbolic geometry (crash course) Greedy (ordinal) embeddings Prior and related work Lower bounds (on Minkowski and hyperbolic dimension) Techniques: duality and topology Upper bounds for trees
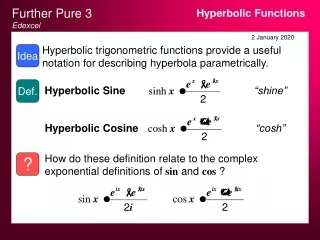
Hyperbolic geometry: Construction • -dimensional hyperbolic space : • Defined on upper-half space via • Defined on unit-disc via
Hyperbolic isometries Inversion Dilation Translation
Hyperbolic models Unit-disk model Half-plane model Klein model
Outline of talk – a little for everybody Compact routing (a small industry) The problem & summary of prior work New applications = new open problems [M’06] Hyperbolic geometry (crash course) Greedy (ordinal) embeddings Prior and related work Lower bounds (on Minkowski and hyperbolic dimension) [M’06] Techniques: duality and topology Upper bounds for trees [M’06]
Greedy embeddings results OPEN: Iterative algorithm for any of the upper bounds (rubber bands?) OPEN: Upper bound for arbitrary graphs in (using SDP duality?)
Lower bound via “hard-crossroad” graph [M’06] Definition: is a greedy embedding if Geometric constraints: Analytic constraints: Geometric set system among points and bisecting hyper-planes! Euclidean Geometric constraints (under-specified set system) Greedy embedding (fully-specified set system) Homeomorphisms Preserve Set systems Homeomorphic map to (same set system) Hyperbolic
Lower bound continued … Disc model -vertices all configurations -vertices Klein model Graph with hard crossroads Use Linear Algebra to show that set system realized in . Argument generalizes to many geodesic metric spaces.
Upper bound for trees in [R. Kleinberg’06] Dual of tiling is a greedy embedding of the infinite 3-ary tree These are generators of Problem: Needs -bits per vertex coordinate
Upper bound for trees in [M’06] Caterpillar decomposition depth -axis -axis -axis -axis
Upper bound for trees in [M’06] … in the limit we get: A repulsing force (with rigid edges) straightens paths Not rubber bands[LLW’88], but repulsing springs will probably get the job done!
Except for the trivial . • ... What is left to do? • We don’t know upper bound on -dimension for arbitrary graphs! • We don’t know upper bound on -dimension for arbitrary graphs, however • We know how to compute best -embedding using an SDP: … Hence we can look for an embedding on the unit sphere … … This can be expressed as an SDP … … It is thus possible that the dual gives insight to upper bounds … … and an iterative algorithm will be sure to find best embedding.
One more thing …. The conjectured relationship between and can be described like this: Embedding dimension Euclidean Hyperbolic Graph complexity On which graphs does Hyperbolic geometry have advantage?