Download
1 / 1
10 likes | 187 Views
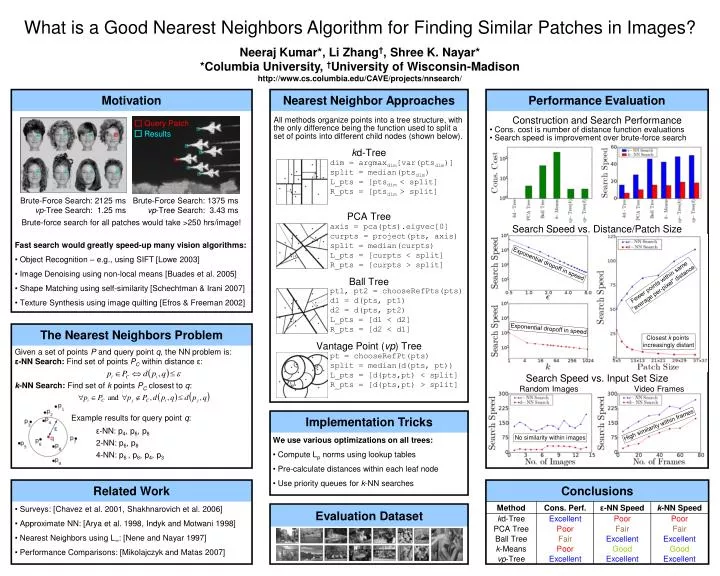
dim = argmax dim [var(pts dim )] split = median(pts dim ) L_pts = [pts dim < split] R_pts = [pts dim > split]. PCA Tree. axis = pca(pts).eigvec[0] curpts = project(pts, axis) split = median(curpts) L_pts = [curpts < split] R_pts = [curpts > split]. Ball Tree.

E N D
dim = argmaxdim[var(ptsdim)] split = median(ptsdim) L_pts = [ptsdim < split] R_pts = [ptsdim > split] PCA Tree axis = pca(pts).eigvec[0] curpts = project(pts, axis) split = median(curpts) L_pts = [curpts < split] R_pts = [curpts > split] Ball Tree pt1, pt2 = chooseRefPts(pts) d1 = d(pts, pt1) d2 = d(pts, pt2) L_pts = [d1 < d2] R_pts = [d2 < d1] Vantage Point (vp) Tree Given a set of points P and query point q, the NN problem is: ε-NN Search: Find set of points PCwithin distance ε: k-NN Search: Find set of k points PC closest to q: pt = chooseRefPt(pts) split = median(d(pts, pt)) L_pts = [d(pts,pt) < split] R_pts = [d(pts,pt) > split] ε-NN: p4, p6, p8 2-NN: p6, p8 4-NN: p6 , p8, p4, p3 What is a Good Nearest Neighbors Algorithm for Finding Similar Patches in Images? Neeraj Kumar*, Li Zhang†, Shree K. Nayar* *Columbia University, †University of Wisconsin-Madison http://www.cs.columbia.edu/CAVE/projects/nnsearch/ Motivation Nearest Neighbor Approaches Performance Evaluation Construction and Search Performance All methods organize points into a tree structure, with the only difference being the function used to split a set of points into different child nodes (shown below). Query Patch • Cons. cost is number of distance function evaluations • Search speed is improvement over brute-force search Results kd-Tree Brute-Force Search: 2125 ms vp-Tree Search: 1.25 ms Brute-Force Search: 1375 ms vp-Tree Search: 3.43 ms Brute-force search for all patches would take >250 hrs/image! Search Speed vs. Distance/Patch Size • Fast search would greatly speed-up many vision algorithms: • Object Recognition – e.g., using SIFT [Lowe 2003] • Image Denoising using non-local means [Buades et al. 2005] • Shape Matching using self-similarity [Schechtman & Irani 2007] • Texture Synthesis using image quilting [Efros & Freeman 2002] Exponential dropoff in speed Fewer points within same “average per-pixel” distance The Nearest Neighbors Problem Exponential dropoff in speed Closest k points increasingly distant Search Speed vs. Input Set Size Random Images Video Frames Example results for query point q: Implementation Tricks High similarity within frames No similarity within images • We use various optimizations on all trees: • Compute Lp norms using lookup tables • Pre-calculate distances within each leaf node • Use priority queues for k-NN searches Related Work Conclusions • Surveys: [Chavez et al. 2001, Shakhnarovich et al. 2006] • Approximate NN: [Arya et al. 1998, Indyk and Motwani 1998] • Nearest Neighbors using L∞: [Nene and Nayar 1997] • Performance Comparisons: [Mikolajczyk and Matas 2007] Evaluation Dataset