Download

1 / 9
110 likes | 304 Views
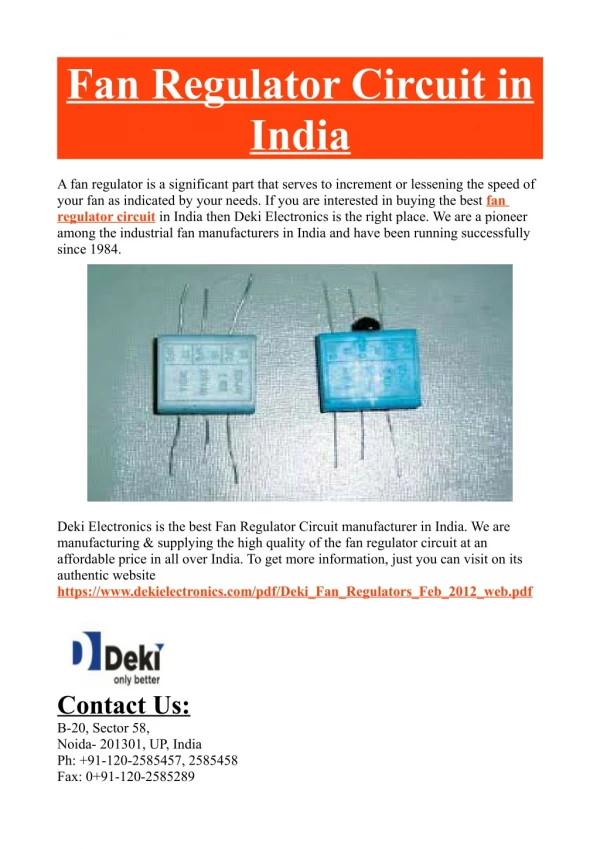
PROPORCIONALNI-P REGULATOR. Sadržaj:. Jednačina upravljanja Funkcija prenosa Odskočni odziv Osobine Elektronski sklop za realizaciju Primer SU sa P regulatorom Dejstvo P regulatora. Kp. Jednačina upravljanja. e(t). u(t). Upravljački signal je direktno proporcionalan signalu greške.

E N D
Sadržaj: • Jednačina upravljanja • Funkcija prenosa • Odskočni odziv • Osobine • Elektronski sklop za realizaciju • Primer SU sa P regulatorom • Dejstvo P regulatora
Kp Jednačina upravljanja e(t) u(t) Upravljački signal je direktno proporcionalan signalu greške. Kp-konstanta pojačanja ili intenzitet proporcionalnog delovanja i može da se menja
Funkcija prenosa Funkcija prenosa regulatora dobija se primenom Laplasove transformacije na izraz za trenutnu vrednost izlaza.
Osobine P regulatora • P regulator ima brzo regulaciono delovanje, ali je regulaciono odstupanje uvek prisutno (signal greške nikad ne može da se dovede na nulu). • Signal greške može da se smanji povećanjem pojačanja Kp , ali se nikada ne dovodi na nulu.
R2 e(t) R1 u(t) Elektronski sklop
u(t) e(t) ω Ur + kp M OU - y(t)=Ktg*ω TG Primer SU sa P regulatorom-Regulacija brzine obrtanja osovine u zatvorenoj sprezi f(t) Zadatak regulacije je da se obezbedi konstantna ugaona brzina ω osovine
Ulazni signal Izlazni signal t Dejstvo P regulatora Posle prelaznog procesa ovaj sistem ulazi u stacionarno stanje u kojem je signal greške konstantan. Postojanje greške nije veliki problem. Može da se izračuna kolika je greška , pa na osnovu toga da se zada referentni napon da bi se na izlazu dobila željena brzina.