Download
1 / 1
10 likes | 95 Views
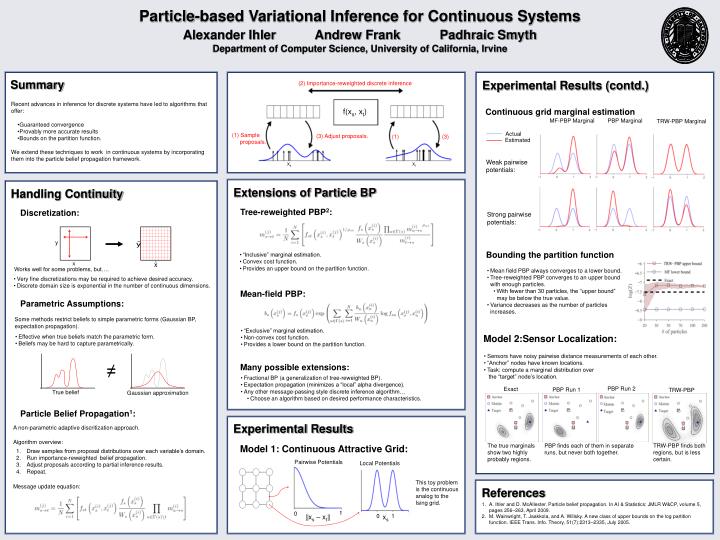
Particle-based Variational Inference for Continuous Systems Alexander Ihler Andrew Frank Padhraic Smyth Department of Computer Science, University of California, Irvine. Summary. Experimental Results (contd.).

E N D
Particle-based Variational Inference for Continuous Systems Alexander Ihler Andrew Frank Padhraic Smyth Department of Computer Science, University of California, Irvine Summary Experimental Results (contd.) • Recent advances in inference for discrete systems have led to algorithms that offer: • Guaranteed convergence • Provably more accurate results • Bounds on the partition function. • We extend these techniques to work in continuous systems by incorporating them into the particle belief propagation framework. Continuous grid marginal estimation MF-PBP Marginal PBP Marginal TRW-PBP Marginal Actual Estimated Weak pairwise potentials: (2) Importance-reweighted discrete inference f(xs, xt) Extensions of Particle BP • Sample • proposals. (3) Adjust proposals. (1) (3) Handling Continuity Xs Xt Tree-reweighted PBP2: Discretization: Strong pairwise potentials: Bounding the partition function • “Inclusive” marginal estimation. • Convex cost function. • Provides an upper bound on the partition function. y Works well for some problems, but…. • Mean field PBP always converges to a lower bound. • Tree-reweighted PBP converges to an upper bound with enough particles. • With fewer than 30 particles, the “upper bound” may be below the true value. • Variance decreases as the number of particles increases. • Very fine discretizations may be required to achieve desired accuracy. • Discrete domain size is exponential in the number of continuous dimensions. x Mean-field PBP: Parametric Assumptions: Some methods restrict beliefs to simple parametric forms (Gaussian BP, expectation propagation). • “Exclusive” marginal estimation. • Non-convex cost function. • Provides a lower bound on the partition function. Model 2:Sensor Localization: • Effective when true beliefs match the parametric form. • Beliefs may be hard to capture parametrically. • Sensors have noisy pairwise distance measurements of each other. • “Anchor” nodes have known locations. • Task: compute a marginal distribution over • the “target” node’s location. ≠ Many possible extensions: • Fractional BP (a generalization of tree-reweighted BP). • Expectation propagation (minimizes a “local” alpha divergence). • Any other message-passing style discrete inference algorithm… • Choose an algorithm based on desired performance characteristics. PBP Run 2 Exact PBP Run 1 TRW-PBP True belief Gaussian approximation Particle Belief Propagation1: Experimental Results A non-parametric adaptive discritization approach. Algorithm overview: The true marginals show two highly probably regions. PBP finds each of them in separate runs, but never both together. TRW-PBP finds both regions, but is less certain. Model 1: Continuous Attractive Grid: Draw samples from proposal distributions over each variable’s domain. Run importance-reweighted belief propagation. Adjust proposals according to partial inference results. Repeat. Pairwise Potentials Local Potentials This toy problem is the continuous analog to the Ising grid. Message update equation: References A. Ihler and D. McAllester. Particle belief propagation. In AI & Statistics: JMLR W&CP, volume 5, pages 256–263, April 2009. M. Wainwright, T. Jaakkola, and A. Willsky. A new class of upper bounds on the log partition function. IEEE Trans. Info. Theory, 51(7):2313–2335, July 2005. 1 0 0 1 ||xs – xt|| xs