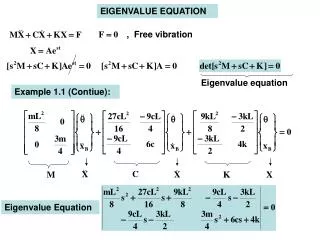
Download
1 / 34
350 likes | 378 Views
Vibration Theory. Overview. Severity levels Filters Detectors (RMS, peak-peak, Crest factor) Frequency analysis Displacement, Velocity Acceleration Resonances Different signal types (in time domain) Harmonics Pulses Random noise. Continuous Measurements. X2: LP BP. X5: HBP. X0: HP.

E N D
Overview • Severity levels • Filters • Detectors (RMS, peak-peak, Crest factor) • Frequency analysis • Displacement, Velocity Acceleration • Resonances • Different signal types (in time domain) • Harmonics • Pulses • Random noise
Continuous Measurements X2: LP BP X5: HBP X0: HP X3: LP ISO X1: DC X6: CBP X4: ISO Severity 0.01 0.1 1 10 100 1k 10k 100k [Hz] 0.15Hz mm/s RMS 8 6 4 2 Unbalance Max: 40kHz Bias/ Position Misalignment Cavitation Critical Speeds Turbulence/Stall Bent shaft REBearings/Resonances Gears/Resonances Belt Resonance Looseness Blade passage
Filtering ISO bandpass filter 10Hz – 1kHz BP101000 Unbalance Misalignement
High frequency faults BP100010000 Gear faults Bearing faults Resonances
RMS RMS T = Time period
RMS = Root Mean Square Square Root • Root Mean Square take the squares of all the sampled amplitudes in one period, • The energy of the vibration is related to the square of the velocity of the vibration • When measuring RMS of an AC voltages you get the same energy as you would get out of a DC at the same level • For sinusoidal motion the RMS = 0.707 * Peak level • Or • or 0.353 * peak-peak level Mean Equivalent Power level a
Detector types For Sinewaves only: a RMS peak RMS Average is not used T = averaging period Crest factor = True peak - peak RMS Peak=RMS*
Driven machine RPM • To drivenmachine Gear mesh Frequency analysis for separating machine symptome Misalignement Vibration mm/s Frequency Hz
Frequency analysis Same information Time: When? Frequency: How often? Frequency (Period) every 0:10 min Time 7:00 7:10 7:20 7:30 7:40 7:50 8:00 8:10 … 12 11 1 10 2 3 9 4 8 5 7 6 Phase First 7:00
Spectrum vs. Time 1600x . . 8x 7x etc. 6x 5x Hz 4x 3x 2x 1x FFT Frequency spectrum Analysis period Bin How often ? Analysis period BIN Time signal Sec. When ?
Adding sine waves may yield any periodic shape Baron Jean-Baptiste Fourier 1768-1830 + Forrier transform: Any peridic shape can be split into sine and cosine waves + + =
0.5 Hz 1 Hz Displacement (Position) curve ”someting that vibratates” Double frequency – half period Higher frequency = faster movement
Conclusion Shorter time cycle, Higher Frequency Time Signal Frequency Spectrum p(t) A t T f 1/T A p(t) t t f 1/t
Velocity The velocity is the change of (displacement) position per time unit velocity Velocityvector Velocityvector Displacement
Doubling freqency – double velocity (for the same displacement) 1 Hz Velocity mm/s 2 Hz Velocity mm/s Frequency Hz 1 2 Frequency Hz 1 2
Acceleration = Change of velocity with time Constant Acceleration Constant speed (of ball and car) (of ball only)
Acceleration = Change of velocityDouble frequency 4 times acceleration *) 1 Hz 0.5 Hz Higher frequency = faster change of velocity movement 2 Hz *) For same displacement
Sensors measure Acceleration, Velocity or Displacement Displacement sensor Measure the distance from bearing to shaft Used in journal bearing machines and for tacho application Velocity sensor ÷ The design contain moving parts÷ Limited frequency range + Good signal Accelerometer Most versatile for vibration meaurements The acceleration signal may be integrated to velocity and displacement
Acceleration most information Velocity flattest spectrum Displacement emphasize low frequency Acceleration Velocity Displacement All peaks align but different rel. magnitude m/s2 mm/s µm = Noise floor Frequency = f ω
Resonance Mass Spring Damper No damping Undercricical damping Critical damping Overcrictical damping
Resonance At low frequenies: Mass and force move together At same phase Mass Responce vibration At resonance: The exiatation leads the responce By 90° and is larger (depending on damping) Damper Spring Driving Vibration Relative vibration amplitude At high frequencies: The responce is dampened And running at oposite Phase 1 0° -45° Relative phase -90° -135° -180° Frequency
Every machine part can be considered as a spring – damper system ( )having it’s own transfer characteristicscalled mobility Vibrations Internal Forces Vibration= Force * Mobility
A pulsed signal and random signal looks the same way in the spectrum Time ms Random noise Pulse Time ms Vibration amplitude high frequency resonances Frequency(Hz) 1 kHz
Short pulses excite higher frequency Boof Soft (long) impact No resonance excitation No ringing Cliiinging Time(ms) tL Time(ms) Hard (short) impact ! the high frequency resonance are excited tS Vibration amplitude Frequency(Hz) = 1 kHz = 10 kHz
Modulation of time signal Side bands in spectrum Vibration amplitude Frequency(Hz) Amplitude modulation = Carrier Modulation Time
Harmonics in the modulation produces more side bands Vibration amplitude Frequency(Hz) Frequency modulation Frequency modulation Also produces Sideband families GW Pi Time(sec)
Isolated defect Distributed defect Misaligned Pinion Pinion Gear Wheel GW Pi TM-n*Pi TM TM+n*Pi GW Pi TM-n*Pi TM TM+n*Pi
Vibration amplitude Vibration amplitude Broken pinion tooth Broken Gear wheel tooth FrequencyHz Hz = GW Pi GW Pi Time(sec)
Vibration amplitude Beat from 2 close signals Fluktuating peak Frequency + = However beat does normally not produce side bands Why ? Time
Bearings produces unique bearing frequencies • Outer race faults • 1 – 6 month from detection to critical • Inner race faults • 1 – 4 weeks from detection to critical • Ball faults • 1 hour – 1 day from detection to critical