Download
1 / 1
10 likes | 158 Views
DOES THE LINEAR SYNERGY HYPOTHESIS GENERALIZE BEYOUND THE SHOULDER AND ELBOW IN MULTI-JOINT REACHING MOVEMENTS? James S. Thomas*, Daniel M Corcos†,, and Ziaul Hasan†. School of Physical Therapy*, Ohio University, Athens OH. School of Kinesiology†, University of Illinois at Chicago, Chicago IL.

E N D
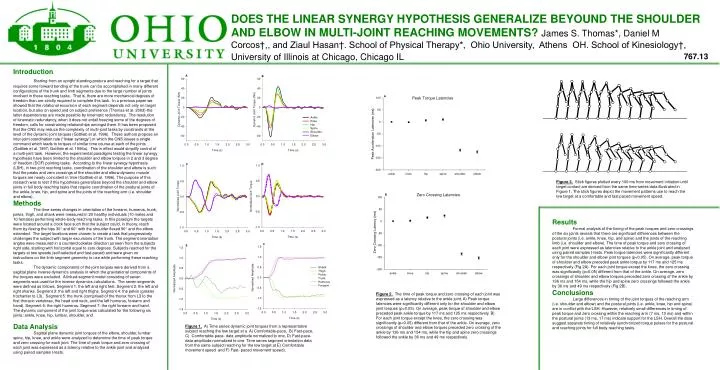
DOES THE LINEAR SYNERGY HYPOTHESIS GENERALIZE BEYOUND THE SHOULDER AND ELBOW IN MULTI-JOINT REACHING MOVEMENTS?James S. Thomas*, Daniel M Corcos†,, and Ziaul Hasan†. School of Physical Therapy*, Ohio University, Athens OH. School of Kinesiology†, University of Illinois at Chicago, Chicago IL 767.13 Introduction Starting from an upright standing posture and reaching for a target that requires some forward bending of the trunk can be accomplished in many different configurations of the trunk and limb segments due to the large number of joints involved in these reaching tasks. That is, there are more mechanical degrees of freedom than are strictly required to complete this task. In a previous paper we showed that the rotational excursion of each segment depends not only on target location, but also on speed and on subject preference (Thomas et al. 2003)-the latter dependences are made possible by kinematic redundancy. The resolution of kinematic redundancy, when it does not entail freezing some of the degrees of freedom, calls for constraining relationships amongst them. It has been proposed that the CNS may reduce the complexity of multi-joint tasks by constraints at the level of the dynamic joint torques (Gottlieb et al. 1996). These authors propose an inter-joint coordination rule (“linear synergy”) in which the CNS issues a single command which leads to torques of similar time course at each of the joints (Gottlieb et al. 1997; Gottlieb et al. 1996a). This in effect would simplify control of a multi-joint task. However, the experimental paradigms testing the linear synergy hypothesis have been limited to the shoulder and elbow torques in 2 and 3 degree of freedom (DOF) pointing tasks. According to the linear synergy hypothesis (LSH), in two-joint reaching tasks, coordination of the shoulder and elbow is such that the peaks and zero crossings of the shoulder and elbow dynamic muscle torques are nearly coincident in time (Gottlieb et al. 1996). The purpose of this research was to test if this hypothesis generalizes beyond the shoulder and elbow joints in full body reaching tasks that require coordination of the postural joints of the ankle, knee, hip, and spine and the joints of the reaching arm (i.e. shoulder and elbow). Methods The time-series changes in orientation of the forearm, humerus, trunk, pelvis, thigh, and shank were measured in 20 healthy individuals (10 males and 10 females) performing whole-body reaching tasks. In this paradigm the targets were located around a clock face such that the subject could, in theory, reach them by flexing the hips 30 and 60 with the shoulder flexed 90 and the elbow extended. The target locations were chosen to create a task that progressively challenges the subject with larger excursions of the trunk. The segment orientation angles were measured in a counterclockwise direction as seen from the subjects right side, starting with horizontal equal to zero degrees. Subjects reached for the targets at two speeds (self-selected and fast-paced) and were given no instructions on the limb segment geometry to use while performing these reaching tasks. The dynamic components of the joint torques were derived from a sagittal plane inverse dynamics analysis in which the gravitational components of the torques were excluded. A linked-segment model consisting of seven segments was used for the inverse dynamics calculations. The seven segments were defined as follows. Segment 1: the left and right feet. Segment 2: the left and right shanks. Segment 3: the left and right thighs. Segment 4: the pelvis (greater trochanter to L3). Segment 5: the trunk (comprised of the thorax from L3 to the first thoracic vertebrae, the head and neck, and the left humerus, forearm and hand). Segment 6: the right humerus. Segment 7: the right forearm and hand. The dynamic component of the joint torque was calculated for the following six joints: ankle, knee, hip, lumbar, shoulder, and Data Analysis Sagittal plane dynamic joint torques of the elbow, shoulder, lumbar spine, hip, knee, and ankle were analyzed to determine the time of peak torque and zero crossing for each joint. The time of peak torque and zero crossing of each joint was expressed as a latency relative to the ankle joint and analyzed using paired samples t-tests. Figure 3.Stick figures plotted every 100 ms from movement initiation until target contact are derived from the same time-series data illustrated in Figure 1. The stick figures depict the movement patterns use to reach the low target at a comfortable and fast paced movement speed. Results Formal analysis of the timing of the peak torques and zero crossings of the six joints reveals that there are significant differences between the postural joints (i.e. ankle, knee, hip, and spine) and the joints of the reaching limb (i.e. shoulder and elbow). The time of peak torque and zero crossing of each joint were expressed as latencies relative to the ankle joint and analyzed using paired samples t-tests. Peak torque latencies were significantly different only for the shoulder and elbow joint torques (p<0.05). On average, peak torque of shoulder and elbow preceded peak ankle torque by 117 ms and 125 ms respectively (Fig 2A). For each joint torque except the knee, the zero crossing was significantly (p<0.05) different from that of the ankle. On average, zero crossings of shoulder and elbow torques preceded zero crossing of the ankle by 136 ms and 154 ms, while the hip and spine zero crossings followed the ankle by 36 ms and 49 ms respectively (Fig 2B). Conclusions Large differences in timing of the joint torques of the reaching arm (i.e. shoulder and elbow) and the postural joints (i.e. ankle, knee, hip and spine) are in conflict with the LSH. However, relatively small differences in timing of peak torque and zero crossing within the reaching arm (7 ms, 13 ms) and within the postural joints (13 ms, 17 ms) indicate support for the LSH. Overall the data suggest separate timing of relatively synchronized torque pulses for the postural and reaching joints for full body reaching tasks. Figure 2. The time of peak torque and zero crossing of each joint was expressed as a latency relative to the ankle joint. A) Peak torque latencies were significantly different only for the shoulder and elbow joint torques (p<0.05). On average, peak torque of shoulder and elbow preceded peak ankle torque by 117 ms and 125 ms respectively. B) For each joint torque except the knee, the zero crossing was significantly (p<0.05) different from that of the ankle. On average, zero crossings of shoulder and elbow torques preceded zero crossing of the ankle by 136 ms and 154 ms, while the hip and spine zero crossings followed the ankle by 36 ms and 49 ms respectively. Figure 1.A) Time series dynamic joint torques from a representative subject reaching the low target at a A) Comfortable-pace, B) Fast-pace, C) Comfortable-pace- data amplitude normalized to one, D) Fast-pace-data amplitude normalized to one. Time series segment orientation data from the same subject reaching for the low target at E) Comfortable movement speed and F) Fast- paced movement speed).






