Download
1 / 1
10 likes | 141 Views
------- d leg = 0 ------- d leg = 0.18. Effects of leg stiffness and damping on the robustness in a running biped Tim van Oijen, Daniël Karssen - 2008. Results

E N D
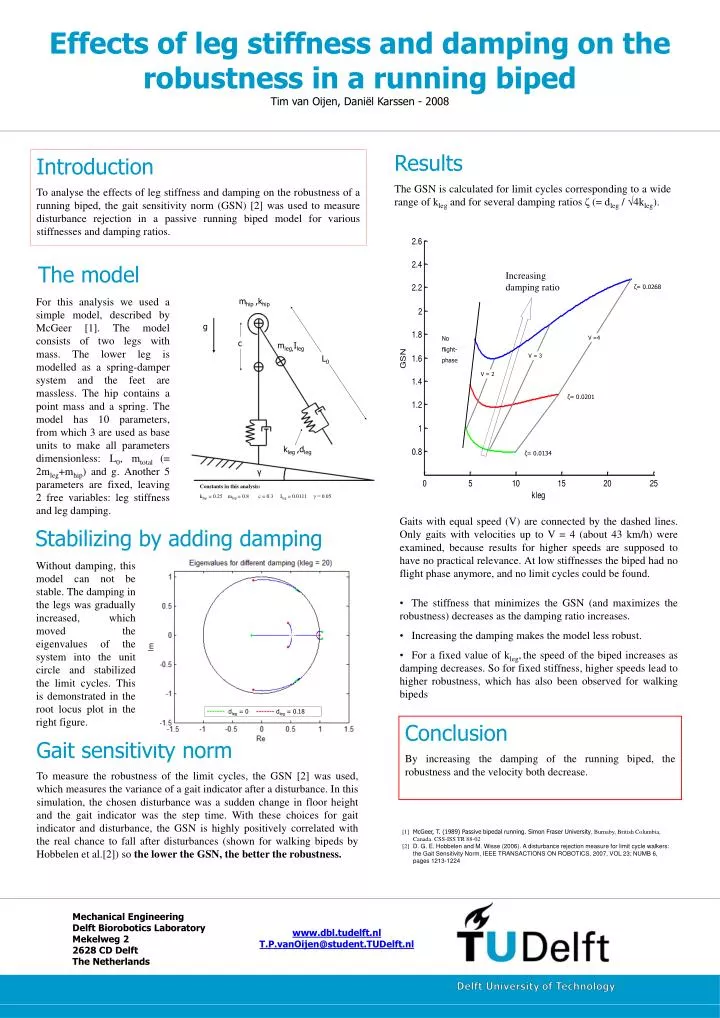
-------dleg = 0-------dleg = 0.18 Effects of leg stiffness and damping on the robustness in a running bipedTim van Oijen, Daniël Karssen - 2008 Results The GSN is calculated for limit cycles corresponding to a wide range of kleg and for several damping ratios ζ(= dleg / 4kleg). Introduction To analyse the effects of leg stiffness and damping on the robustness of a running biped, the gait sensitivity norm (GSN) [2] was used to measure disturbance rejection in a passive running biped model for various stiffnesses and damping ratios. The model Increasing damping ratio ζ= 0.0268 For this analysis we used a simple model, described by McGeer [1]. The model consists of two legs with mass. The lower leg is modelled as a spring-damper system and the feet are massless. The hip contains a point mass and a spring. The model has 10 parameters, from which 3 are used as base unitsto make all parameters dimensionless: L0, mtotal (= 2mleg+mhip) and g. Another 5 parameters are fixed, leaving 2 free variables: leg stiffness and leg damping. mhip ,khip g V =4 No flight- phase c mleg,Ileg V = 3 L0 V = 2 ζ= 0.0201 kleg ,dleg ζ= 0.0134 γ Constants in this analysis: khip = 0.25 mhip = 0.8 c = 0.3 Ileg = 0.0111γ = 0.05 • Gaits with equal speed (V) are connected by the dashed lines. Only gaits with velocities up to V = 4 (about 43 km/h) were examined, because results for higher speeds are supposed to have no practical relevance. At low stiffnesses the biped had no flight phase anymore, and no limit cycles could be found. • The stiffness that minimizes the GSN (and maximizes the robustness) decreases as the damping ratio increases. • Increasing the damping makes the model less robust. • For a fixed value of kleg,the speed of the biped increases as damping decreases. So for fixed stiffness, higher speeds lead to higher robustness, which has also been observed for walking bipeds Stabilizing by adding damping Without damping, this model can not be stable. The damping in the legs was gradually increased, which moved the eigenvalues of the system into the unit circle and stabilized the limit cycles. This is demonstrated in the root locus plot in the right figure. Conclusion By increasing the damping of the running biped, the robustnessand the velocity both decrease. Gait sensitivity norm To measure the robustness of the limit cycles, the GSN [2] was used, which measures the variance of a gait indicator after a disturbance. In this simulation, the chosen disturbance was a sudden change in floor height and the gait indicator was the step time. With these choices for gait indicator and disturbance, the GSN is highly positively correlated with the real chance to fall after disturbances (shown for walking bipeds by Hobbelen et al.[2]) so the lower the GSN, the better the robustness. [1] McGeer, T. (1989) Passive bipedal running. Simon Fraser University, Burnaby, British Columbia, Canada. CSS-ISS TR 88-02 [2] D. G. E. Hobbelen and M. Wisse (2006). A disturbance rejection measure for limit cycle walkers: the Gait Sensitivity Norm, IEEE TRANSACTIONS ON ROBOTICS, 2007, VOL 23; NUMB 6, pages 1213-1224






