Download
1 / 9
90 likes | 198 Views
LARGE-EDDY SIMULATION and LAGRANGIAN TRACKING of a DIFFUSER PRECEDED BY A TURBULENT PIPE. Fabio Sbrizzai a , Roberto Verzicco b and Alfredo Soldati a. a Università degli studi di Udine: Centro Interdipartimentale di Fluidodinamica e Idraulica Dipartimento di Energetica e Macchine

E N D
LARGE-EDDY SIMULATIONand LAGRANGIAN TRACKING of a DIFFUSER PRECEDED BY A TURBULENT PIPE Fabio Sbrizzaia, Roberto Verziccob and Alfredo Soldatia a Università degli studi di Udine: Centro Interdipartimentale di Fluidodinamica e Idraulica Dipartimento di Energetica e Macchine b Politecnico di Bari: Dipartimento di Ingegneria Meccanica e Gestionale Centre of Excellence for Computational Mechanics Sep 07, 2006
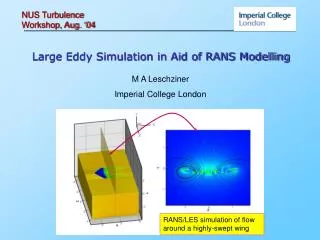
LARGE-EDDY SIMULATION OF THE FLOW FIELD • Flow exits from a turbulent pipe and enters the diffuser. • Kelvin-Helmholtz vortex-rings shed periodically at the nozzle. • Pairing/merging produces 3D vorticity characterized by different scale structures.
l=10 r r L=8 r NUMERICAL METHODOLOGY • Two parallel simulations: • Turbulent pipe DNS • LES of a large-angle diffuser • DNS velocity field interpolated and supplied to LES inlet. • Complex shape walls modeled through the immersed-boundaries (Fadlun et al., 2000)
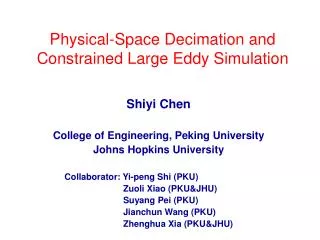
LAGRANGIAN PARTICLE TRACKING • O(105) particles having diameter of 10, 20, 50 and 100 mm with density of 1000 kg/m3 • Tracked using a Lagrangian reference frame. • Particles rebound perfectly on the walls. • How to model immersed boundaries during particle tracking? BLUE = particles released in the boundary layer RED = particles released in the inner flow
PARTICLE REBOUND Particles rebound on a curved 3D wall. curve equation:
LOCAL REFERENCE FRAME • To properly model particle rebound within Lagrangian tracking, we use a local reference frame X-Y. • X-axis is tangent to the curve, Y is perpendicular. • Particle bounces back symmetrically with respect to surface normal. • X-Y reference frame is rotated with respect to r-z by angle q.
sinq cosq cosq -sinq = sinq cosq cosq -sinq Ur Uz Ux Uy = FRAME ROTATION • Calculation of angle q: • Rotation matrix. Position: r z X Y Velocity:
e = reflection coefficient (e = 1 perfect rebound) PARTICLE REFLECTION
FINALLY… • Particle coordinates and velocities are rotated back by the inverse (transposed) of the rotation matrix. • That’s it!