Download
1 / 28
290 likes | 317 Views
Learn about stereo imaging, image rectification, and 3D reconstruction using stereo vision. Explore methods such as feature extraction, depth estimation, and shape reconstruction. Discover algorithms like dynamic programming and multi-scale edge matching for accurate results.

E N D
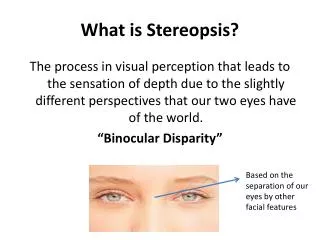
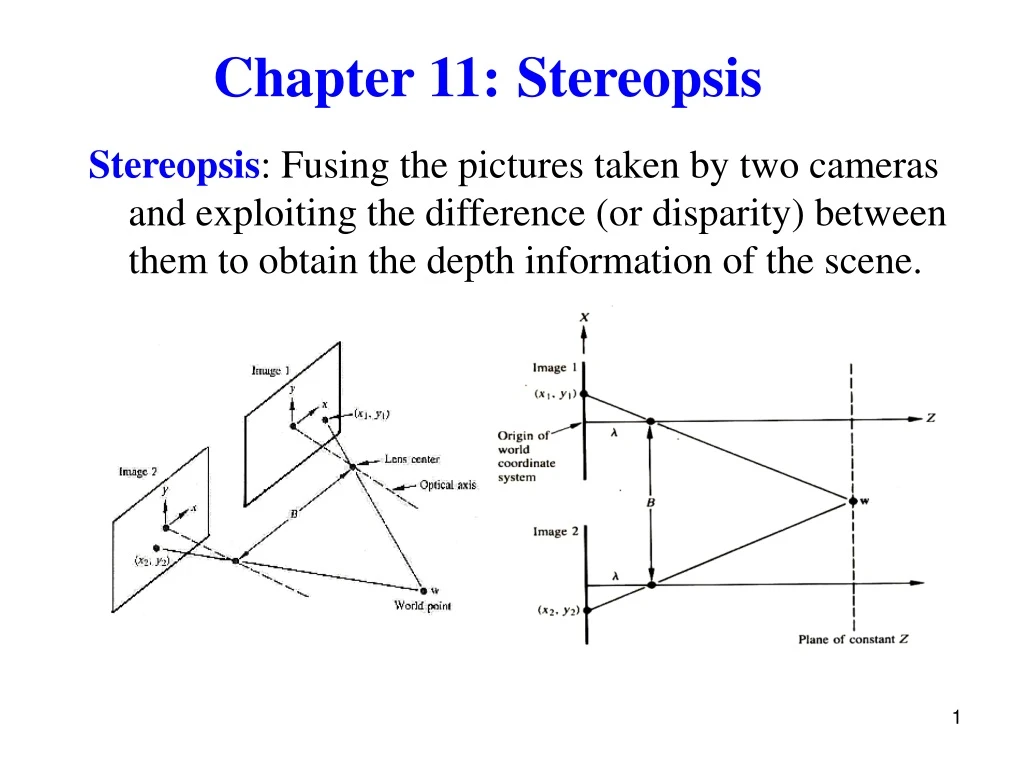
Chapter 11:Stereopsis Stereopsis: Fusing the pictures taken by two cameras and exploiting the difference (or disparity) between them to obtain the depth information of the scene.
○ Stereo imaging (1) Bring the first camera to coincide with the world coordinate system. The coordinates of w Similarly, (2) (3) Substitute (2) into (1) (4) Solve for Z
11.1.1 Image Rectification -- Replace the input images with pictures parallel to the baseline
Idea: Make the rectified epipolar lines lie on the scanline, which is paralleled to the baseline
11.1 3D Reconstruction -- Recover 3D information from 2D data ○ Stereo vision involves: Feature extraction Feature correspondence Depth estimation 3D shape reconstruction 。Epipolar constraint restricts feature correspondence along epipolar lines
○ Difficulties: 。 Sparse depth information
。 Measurement errors: The rays R and R’ will never intersect due to calibration and feature localization ( p and p’) errors
○ Solutions: 。Heuristic approach (1) Find the line segment perpendicular to R and R’ (2) Take its mid-point P as the preimage of p and p’
。Algebraic approach: Given (a) projection matrices: M and M’ (b) matching points: p and p’ From perspective projection relations, i) This is an over-constrained system of four (2 for p and 2 for p’) independent linear equations in P (3 unknowns x, y, z) ii) Solve using linear least-squares techniques.
。Optimization method: Reconstruct the scene point Q by where p, p’: discrete pixels q , q’: actual images Solve using nonlinear least-squares techniques
11.3 Binocular Fusion ○ Random dot stereogram -- A pair of images obtained by randomly spraying black dots on a small square plate floating over a larger one
Stereoscopically, the image pair gives the impression of a square in front of the surround
。Cooperative stereopsis algorithm (Marr and Poggio, 1976) -- relies on three constraints: (a)Compatibility -- Two image features can only match if they possess similar properties (b) Uniqueness -- A feature in one image matches at most one feature in the other picture (c) Continuity -- The disparity of matches varies smoothly in the image
11.3.1 Correlation -- Find pixel correspondences by comparing intensity profiles in the neighborhood of potential matches
○ Problem of assuming that the observed surface is (locally) parallel to the two image planes • Two-pass algorithm: • Use initial estimates • of the disparity to • warp the windows • to compensate for • unequal amount of • foreshortening ii) Find disparity and its derivatives that maximize the correlation between the two windows
11.3.2 Multi-Scale Edge Matching -- Edge matching preferred to point matching -- Correspondences are found at a variety of scales
○ Multi-scale binocular fusion algorithm 。 Larger scale -> fewer noises, less precise in location 。Smaller scale -> more noises, more precise in location
superimposition Image 2 Image 1 Single scale matching Multiscale matching
11.3.3 Dynamic Programming ○ Ordering constraint In case 1, the order of feature points along the two epipolar lines is the same. In case 2, a small object lies in front of a larger one. Some surface points are not visible in one of the images (e.g., A is not visible in the right image), and the order of the image points (e.g., B and D) is not the same in the two pictures. Case 2 Case 1
○ Example: Match intervals between two corresponding epipolar lines
11.4 More Cameras 11.4.1 Three Cameras -- Additional cameras eliminate ambiguity ○ The third image can be used to check hypothetical matches between the first two pictures i) A 3D point is first constructed from two images and is then projected onto the third image ii) Given three cameras and two images of a point, predict its position in a third image by intersecting corresponding epipolar lines
11.4.2 Multiple Cameras ○ Multicamera method (Okutami and Kanade 1993) Matches are found using all pictures.