Download
1 / 43
430 likes | 448 Views
Learn about a parameterization method with bounded distortion, simultaneous partitioning, and valid parameterization without self-intersections, optimized for speed and accuracy.

E N D
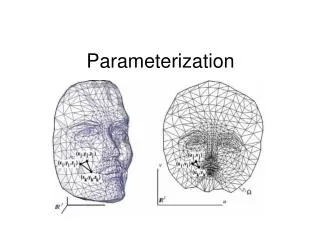
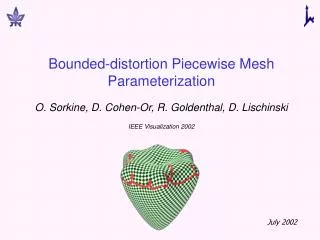
Bounded-distortion Piecewise Mesh Parameterization O. Sorkine, D. Cohen-Or, R. Goldenthal, D. Lischinski IEEE Visualization 2002 July 2002
Existing methods – main ideas • Partition/cut the mesh in preprocess • Interactive user input • Normals bucketing • Region growing from feature curves • Flatten each patch by energy minimization • Convex mapping • Harmonic mapping • Conformal mapping
Normal partition • Doesn’t detect developable structures • Prone to self-intersection problems
Various flattening methods • Floater 97, Lévy and Mallet 98 • Maillot et al. 93, Eck et al. 95, Lee et al. 98 • Sander et al. 01, Gu et al. 02 • Haker et al. 00, Sheffer 02, Lévy et al. 02 • Zigelman et al. 02 • Bennis et al. 91
Disadvantages • A-priori partition sets lower bound on the distortion cannot comply with preset upper bound on the distortion. • If the distortion is too high, need to subdivide the partition and recompute the parameterization. • Most of the methods cannot prevent triangle flips and global self-intersections (overlaps). • High computational cost (for non-linear optimizations).
Our contribution • Parameterization with bounded distortion • Simultaneous partition and parameterization • Valid parameterization – no self-intersections
Algorithm overview • Greedy algorithm: grow one patch at a time, until no more vertices can be added. • At each step, attempts to flatten the “best” vertex adjacent to the current patch. • The distortion of each mesh triangle is guaranteed to be below specified threshold.
Algorithm overview • Select random seed triangle, flatten it. • Maintain a priority queue of the vertices adjacent to the current patch. • Flatten triangles adjacent to current patch: • At each step, take the best vertex off the queue • Check for self-intersections • Stop when no triangles can be added to the patch, and start a new one.
The 3D surface The planar patch
The 3D surface The planar patch
The 3D surface The planar patch
The 3D surface The planar patch
The 3D surface The planar patch
The 3D surface The planar patch
The 3D surface The planar patch
The 3D surface The planar patch
The 3D surface The planar patch
The 3D surface The planar patch
The 3D surface The planar patch
The 3D surface The planar patch
The 3D surface The planar patch
The distortion metric p3 q3 S T T’ p1 q1 q2 p2 In2D In3D
The distortion metric • The Jacobi matrix of S is 3x2 real matrix: • The singular values of J are:
The distortion metric • The values max and min are the maximal stretching and shrinking caused to a unit-length vector by the mapping S. • We want to equally “punish” stretch and shrink, therefore we define: D(T, T’) = max{max, 1/ min} • Any other reasonable metric can be used!
Flattening a single vertex • The obtained position v can be used as initial guess for a relaxation procedure that finds better position v’ (for example, minimizes the average distortion of triangles incident to the vertex). • However, it is slower, and the initial guess performs well in practice.
Vertex grade components • Maximal distortion caused to the triangles flattened with the vertex. If it’s greater than the threshold, the grade is set to zero and the vertex can’t be flattened in the current patch! • The ratio between patch area and squared perimeter (to create round patches with small boundary length). • Crease angles or other segmentation information. • More criteria…
Checking self-intersections • Local self-intersection – triangle flipping
Checking self-intersections • Global self-intersections: maintain space partition data structure, check the new triangles with the existing boundary triangles.
Adding seams • After the patch is finished, we may add seams as a post-process, to benefit from cylinder-like structure.
Adding seams • After the patch is finished, we may add seams as a post-process, to benefit from cylinder-like structure.
3.0 3.0 3.0 2.0 2.0 2.0 1.5 1.5 1.5 1.0 1.0 1.0 Results
Results Bounding the area/perimeter2 ratio...
Comparison with relaxation technique, normal bucketing partition • Conclusions about our method: • Much faster. • Lower average distortion. • Boundary length – sometimes the same, sometimes longer…