Download
1 / 20
200 likes | 212 Views
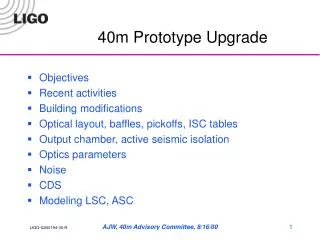
This meeting aims to understand the performance of the 40m Mode Cleaner (MC) and compare it with the LIGO MC performance. The objectives include improving noise contents, evaluating the lock status of the 40m MC, analyzing the performance of the 40m PSL, discussing the MC servo topology and open loop transfer function, and identifying ways to reduce frequency noise.

E N D
40m Mode Cleaner meeting Today’s objectives • understand 40m Mode Cleaner. • compare 40m MC performance with LIGO MC performance. • have a plan to improve noise Contents • Lock status of 40m MC • Performance of 40m PSL • MC servo topology • MC open loop transfer function • MC noise Osamu Miyakawa, Caltech, LIGO Project
14 hours Lock stability of 40m MC with detection mode • Lock is acquired smoothly (within 5sec). • Transition to detection mode sometimes fails. • Typical lock time: • - 20 or 30 min in daytime. • - 1 or 2 hour in night. • - Longest lock is 14hours. • Human activity around MC2 breaks MC lock out because of poor isolation of MC2 chamber. 09/12/2002 Osamu Miyakawa, Caltech, LIGO Project
Requirement of Frequency noise ??? Ref:LIGO-T9702518-02-D Mode Cleaner Length/Frequency Control Design Osamu Miyakawa, Caltech, LIGO Project
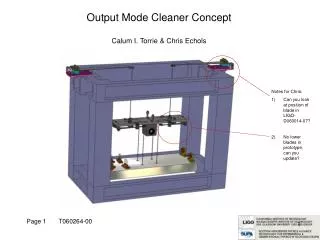
Picture of PSL • Stable and good noise performance. • Injection power to MC is 300mW. Osamu Miyakawa, Caltech, LIGO Project
Open loop gain of 40m FSS 09/26/2002 • Unity gain frequency=309kHz • (design : 600kHz) • phase margin=28degree Osamu Miyakawa, Caltech, LIGO Project
Frequency noise of 40m PSL 09/25/2002 • Frequency noise of PSL was estimated by closed FSS error signal. • Free running noise is estimated by closed FSS error signal and FSS closed loop gain. Osamu Miyakawa, Caltech, LIGO Project
Open loop T.F. of 40m PMC servo 09/17/2002 Osamu Miyakawa, Caltech, LIGO Project
40m PMC frequency noise 09/23/2002 Osamu Miyakawa, Caltech, LIGO Project
Servo topology of MC Fdemod Ref:LIGO-T9702518-02-D Mode Cleaner Length/Frequency Control Design Osamu Miyakawa, Caltech, LIGO Project
Design open loop gain of MC detection mode • Cross over frequency=2.0Hz • Unity gain frequency=100kHz • phase margin @100kHz= 51degree Ref:LIGO-T9702518-02-D Mode Cleaner Length/Frequency Control Design Osamu Miyakawa, Caltech, LIGO Project
Open loop gain of LLO MC Mar 08, 2002 • Phase margin seems enough. • What limits open loop gain? Osamu Miyakawa, Caltech, LIGO Project
Open loop gain of LHO MC Aug10, 2002 • Why phase margin increased in cgain 20dB? • What limits open loop gain? Osamu Miyakawa, Caltech, LIGO Project
Measured open loop gain of 40m MC 09/13/2002 • Cross over frequency=6.7Hz (design:2.0Hz) • Unity gain frequency=32kHz • No phase margin @100kHz (design : 51degree) Osamu Miyakawa, Caltech, LIGO Project
Requirement for MC error signal • Closed Frequency noise estimated from MC error signal is useful to judge that MC servo is working well. • However, it is not frequency noise of MC transmitted light. Ref:LIGO-T9702518-02-D Mode Cleaner Length/Frequency Control Design Osamu Miyakawa, Caltech, LIGO Project
Frequency noise of Transmitted light Equation of servo topology Fa Fdemod Fp Fb ? Osamu Miyakawa, Caltech, LIGO Project
Approximation of Frequency noise of Transmitted light In observation band D A B C A B C D Osamu Miyakawa, Caltech, LIGO Project
Measured 40m MC error signal 10/14/2002 • MC error signal is not suppressed enough by low gain. • Noise is not limited by frequency noise. Osamu Miyakawa, Caltech, LIGO Project
Open loop noise of 40m MC error signal • Open MC frequency noise is calculated by Closed MC frequency noise, closed loop T.F. of MC and T.F. of cavity pole. • This is called as MC frequency noise, but it is actually PSL frequency noise monitored by MC. 10/14/2002 Osamu Miyakawa, Caltech, LIGO Project
Frequency noise of LLO MC • Why PSL out signal is used? • How is calibration below Cross over frequency ? • --It should be calibrated by MC gain (not VCO loop gain). • How is effect of MC cavity pole? • Why the difference exists between analog and digital? Osamu Miyakawa, Caltech, LIGO Project
Summary • More open loop gain of MC servo. • More phase margin. • Starting noise hunting. Osamu Miyakawa, Caltech, LIGO Project