Download
1 / 22
240 likes | 267 Views
Explore the principles, historical developments, and precision of micro-triangulation, focusing on measurements, calculations, and instruments, with a special emphasis on the QDaedalus System. Discover the challenges and solutions in expanding the triangulation network, as well as the evolution of angle measuring instruments. Learn about significant historical surveys like the Great Trigonometric Survey and developments in micro-triangulation methodology. Join us at the PACMAN meeting held at CERN, Geneva, on May 26, 2014.

E N D
Introduction to Micro-Triangulation PACMAN meeting, CERN - Geneva, 26 May 2014 Vasileios VLACHAKIS
Introduction to Micro-Triangulation Outline • Principle of triangulation • Historical triangulations • Precision at the level of microns • QDaedalus System • Hardware - Instrumentation • Software - Algorithms • Past results at CERN • Future developments PACMAN meeting, CERN – Geneva, 26 May 2014
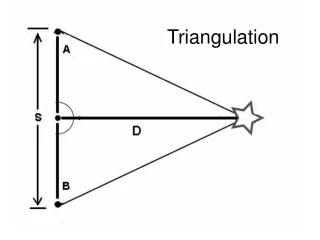
Introduction to Micro-Triangulation Principle of triangulation Measurements / Observations: • Distances (in order to fix the scale) • Directions (w.r.t. the horizontal plane) • Angles (as differences of directions) • Horizontal • Vertical or Zenith Zenith V Hz Calculations / Estimations: • Distances (Unknown/Unmeasured) • Angles (Unknown/Unmeasured) + Coordinates w.r.t a reference system/frame ATLAS Network measurements (LS1 - Feb 2014) PACMAN meeting, CERN – Geneva, 26 May 2014
Introduction to Micro-Triangulation Principle of triangulation As the Triangulation Network expands… • Incompatibility between Observations and Calculations! • Variation between repeated Observations! PACMAN meeting, CERN – Geneva, 26 May 2014
Introduction to Micro-Triangulation Principle of triangulation Incompatibilitybetween Theory and Observations: Closure residuals • a+b+c≠ 180° or 200g or π [degrees] [grads/gons] [rads] • c+ d+ e+ f≠ 360° or 400gor2π Variation between repetitive Observations: • Environment → better control • Instrumentation → more precise + accurate • Observer → better to avoid him! b d e c f a Problem in Theoretical Model? OR / AND in Observations? PACMAN meeting, CERN – Geneva, 26 May 2014
Introduction to Micro-Triangulation Principle of triangulation Problem: As the Triangulation Network expands… …the errors propagate + accumulate! PACMAN meeting, CERN – Geneva, 26 May 2014
Introduction to Micro-Triangulation Principle of triangulation • Solution: • Measurements: • Sufficient • Repeated • Redundant • Adjustment of observations: • Least Squares Adjustment • BLUE (Best Linear Unbiased Estimation) PACMAN meeting, CERN – Geneva, 26 May 2014
Introduction to Micro-Triangulation Evolution of angle measuring instruments Dioptra Heron of Alexandria (10-70 CE) Theodolite Jesse Ramsden (1735-1800) • Dimensions: 540x720x550 mm • Weight: 28kg • Accuracy: 20’’ - 60’’ Total Station Leica Geosystems (1996) • Dimensions: 220x350x180 mm • Weight: 7.5kg • Accuracy: 0.5’’ http://www.makingthemodernworld.org.uk/icons_of_invention/science/1750-1820/IC.014/ http://www.samosin.gr/exhibition/exhibits_uk.html 8 PACMAN meeting, CERN – Geneva, 26 May 2014
Introduction to Micro-Triangulation Measuring the Meter! Before the French Revolution, about 250,000 units of length and weight exist in France • Pierre François André Méchain (1744-1804) and Jean Baptiste Joseph Delambre(1749-1822) measured the meridian arc Dunkerque-Paris-Barcelona • This effort took place during the period from 1792 to 1799 • “The meter" was defined as 1/10,000,000 of the distance North Pole - Equator. • The metric system was to be "pour tous pour toujours" “Repeating circle” of Jean-Charles de Borda (1733 -1799 ) http://pahar.in/survey-of-india-report-maps/ http://www.noa.gr/museum/english/organo_32_en.html 9 PACMAN meeting, CERN – Geneva, 26 May 2014
Introduction to Micro-Triangulation Measuring Earth's highest mountain Great Trigonometric Survey (19th century) • Colonel William Lambton established the mission in 1802 • George Everest took leadership in 1823 • Andrew Scott Waugh replaced Everest as Surveyor-General in 1843 • Mount Everest was calculated (1852, published 1856) to be exactly 29000 ft / 8839.2 m high • Current high 29029 ft / 8848 m • Error of 9.5 cm in a baseline of 11.6 km (≈ 8ppm) http://pahar.in/survey-of-india-report-maps/ 10 PACMAN meeting, CERN – Geneva, 26 May 2014
Introduction to Micro-Triangulation Micro-triangulation Principle of triangulation: Measurements / Observations: • Distances (in order to fix the scale) • Directions (w.r.t. the horizontal plane) • Angles (as differences of directions) Calculations / Estimations: • Distances (Unknown/Unmeasured) • Angles (Unknown/Unmeasured) +Coordinates w.r.t a reference frame Precision in level of micrometers: • Total Station precision ≈ 0.00015g or 1.5 cc • Precision of 2.4μm/m • Precision at 4 m < 10 μm ds = R ∙ dφ dφ ≈ 1.5 cc PACMAN meeting, CERN – Geneva, 26 May 2014
Introduction to Micro-Triangulation QDaedalus Measurement System: • Developed at ETH Zürich (Geodesy and Geodynamics Lab) • Performs contactless, automatic, high precision measurements • Originally developed for rapid and easy determination of astronomical φ, λ, Α • Successor of ICARUS • Low-cost, non-destructive upgrade for automated theodolites (or total stations) • Composed of both, hardware and software developments PACMAN meeting, CERN – Geneva, 26 May 2014
Introduction to Micro-Triangulation The basic idea How it works? • The operator’s eye is replaced by a CCD camera • Non-destructive way • Easily and rapidly mount • A software reads out the image and the angles • Angle measurements obtained faster and more precise What could be the precision? • Optical system resolution ≈ 4 arcsec/pixel • Object extraction ≈ 1/10 pixel or better • The achievable precision ≈ 0.4 arcsec (1.2 cc) • Total Station precision ≈ 0.5 arcsec (1.5 cc) PACMAN meeting, CERN – Geneva, 26 May 2014
Introduction to Micro-Triangulation Components - Hardware The complete system is composed by: • A Total Station / theodolite • TDA5005 by Leica Geosystems (1.5 cc) • A CCD camera • Guppy F-080C by Allied Vision Technologies (4.65 µm, 30 fps) • A steering device for the focus mechanism • P110 064 by Portescap • Interface box (CCD Triggering synchronization of multiple system) • A laptop with the software QDaedalus PACMAN meeting, CERN – Geneva, 26 May 2014
Introduction to Micro-Triangulation Algorithms - Software Optical target recognition (OTR) and measurement: • Center of mass • Template least-squares matching • Circle matching • Ellipse matching Computer vision processing operations: • Image acquisition • Pre-processing (resampling, de-noising,…) • Feature extraction (lines, circles, regions,…) • Segmentation • High-level processing (compute center, size,...) • QDaedalus is developed in C++ on the open source development platform Qt • Qt allows fast creation of cross-platform programs with a graphical user interface • The image processing algorithms are based on the open-source library OpenCV • The management of the data is based on the database engine SQLite PACMAN meeting, CERN – Geneva, 26 May 2014
Introduction to Micro-Triangulation Main features Feature w.r.t. space/time resolution: • Density of points • Precision and Accuracy • Physical materialization of points • Sampling rate of measurements Other important features have to be considered: • Automation degree • Palpate / touchless • Measurement range • Transportability • Easy handling • Price PACMAN meeting, CERN – Geneva, 26 May 2014
Introduction to Micro-Triangulation CLIC module application Automatic Micro-triangulation: • Import of approximate positions of station and targets • Definition of camera, focus, image processing parameters • Start of measurements, fully automatic process Source: Sébastien Guillaume PACMAN meeting, CERN – Geneva, 26 May 2014
Introduction to Micro-Triangulation Measurement of May 2012 Targets: • 9 fixed and illuminated spheres of Ø8 mm Comparison: • CMM with a precision of 6 μm MPE • After 3D Helmert transformation Results: • 1.5 cc, horizontal direction • 1.5 cc, zenithal angles 18 PACMAN meeting, CERN – Geneva, 26 May 2014
Introduction to Micro-Triangulation Future developments Hardware • Instrumental precision is sufficient • Wireless transmission of data and image triggering capabilities • Size reduction would be welcome (easier mechanical adaptation of the camera to the telescope) • Higher acquisition (frame) rates, up to 50 Hz Software • Synchronous steering of several total stations • Detection algorithm for an oscillating stretched wire and new fiducials Targets • Develop and evaluate different types of fiducials, compatible with FSI • Method of marking points on the stretched wire 19 PACMAN meeting, CERN – Geneva, 26 May 2014
Introduction to Micro-Triangulation References • Bürki, B., Guillaume, S., Sorber, P., Oesch, H.-P. (2010). DAEDALUS: A versatile usable digital clip-on measuring system for Total Stations. International Conference on Indoor Positioning and Indoor Navigation (IPIN), Zürich, IEEE. • Griffet, S. (2010). Evaluation des performances du prototype de Micro-Triangulation. Survey report EDMS Document No 1106507, Genève, CERN. • Guillaume, S., Bürki, B., Griffet, S., Mainaud-Durand, H. (2012).QDaedalus: Augmentation of Total Stations by CCD Sensor for Automated Contactless High-Precision Metrology. FIG Working week 2012 Proceedings. • Schmid, M., Wanner, M., Manyoky, M. (2010). Suitability of the Daedalus System for Micro-triangulation. Geodetic Project Course, Geomatics Engineering and Planning. • Waniorek, S. (2011). Automatic Micro-triangulation. Survey report EDMS Document No 1152343, Genève, CERN. PACMAN meeting, CERN – Geneva, 26 May 2014
Introduction to Micro-Triangulation Summary • Triangulation is a very old technique • Useful to obtain geometrical information • In short distances it is able to be precise at micrometer level • Changing the eye-piece with CCD we avoid the observer • Non-destructive upgrade of common Total Stations • Full exploitation of angle measurement precision at short distances (1-4 m) • The precision can be well predicted and it is completely depended on the configuration of the Micro-triangulation network • Developments needed in software, targets and hardware PACMAN meeting, CERN – Geneva, 26 May 2014