Download

1 / 29
300 likes | 483 Views
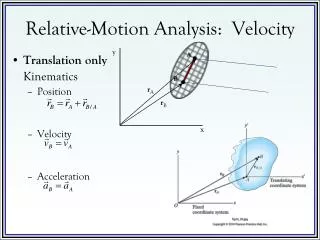
Motion Analysis. Slides are from RPI Registration Class. Registration. Images are described as discrete sets of point locations associated with a geometric measurement Locations may have additional properties such as intensities and orientations Registration problem involves two parts:

E N D
Motion Analysis Slides are from RPI Registration Class.
Registration • Images are described as discrete sets of point locations associated with a geometric measurement • Locations may have additional properties such as intensities and orientations • Registration problem involves two parts: • Finding correspondences between features • Estimating the transformation parameters based on these correspondences
Notation • Set of moving image features • Set of fixed image features • Each feature must include a point location in the coordinate system of its image. Set of correspondences:
Mathematical Formulation • Error objective function depends on unknown transformation parameters and unknown feature correspondences • Each may depend on the other! • Transformation may include mapping of more than just locations • Distance function, D, could be as simple as the Euclidean distance between location vectors.
Correspondence Problem • Determine correspondences before estimating transformation parameters • Based on rich description of features • Error prone • Determine correspondences at the same time as estimation of parameters • “Chicken-and-egg” problem • For the next few minutes we will assume a set of correspondences is given and proceed to the estimation of parameters • We will return to the correspondence problem later
Example: Estimating Parameters • 2d point locations: • Similarity transformation: • Euclidean distance:
What Do We Have? • Least-squares objective function • Quadratic function of each parameter • We can • Take the derivative with respect to each parameter • Set the resulting gradient to 0 (vector) • Solve for the parameters through matrix inversion • We’ll do this in two forms: component and matrix/vector
Component Derivative (b) At this point, we’ve dropped the leading factor of 2. It will be eliminated when this is set to 0.
Gathering • Setting each of these equal to 0 we obtain a set of 4 linear equations in 4 unknowns. Gathering into a matrix we have:
Solving • This is a simple equation of the form • Provided the 4x4 matrix X is full-rank (evaluate SVD) we easily solve as
Matrix Version • We can do this in a less painful way by rewriting the following intermediate expression in terms of vectors and matrices:
Matrix Version (continued) Equal to zero. Take transpose on either side..
Matrix Version (continued) • Taking the derivative of this wrt the transformation parameters (we didn’t cover vector derivatives, but this is fairly straightforward): • Setting this equal to 0 and solving yields:
Comparing the Two Versions • Final equations are identical (if you expand the symbols) • Matrix version is easier (once you have practice) and less error prone • Sometimes efficiency requires hand-calculation and coding of individual terms
Registration (rigid+scale) • Given two point sets • Our goal is to find the similarity transformation that best aligns the moments of the two point sets. • In particular we want to find • The rotation matrix R, t • The scale factor s, and • The translation vector t
Second Moments • Scatter matrix • Eigenvalue / eigenvector decomposition (Sp) • where li are the eigenvalues and the columns of Vp hold the corresponding eigenvectors:
Rotation, Translation and Scale • Rotated, uniformly scaled points: • Center of the rotated data is the same as the rotated, scaled and translated center before rotation:
Scatter Matrix • Rotated, scaled scatter matrix:
Eigenvectors and Eigenvalues • An eigenvector is a favorite direction for a matrix. • Any square matrix M has at least one nonzero vector v which is mapped in a particularly simple way M v = vv is eigenvector of A and is corresponding eigenvalue • If > 0, M v is parallel to v. If < 0, they are antiparallel. If zero, v is in the nullspace. • In all cases, M v is just a multiple of v.
Eigenvalues and Eigenvectors • Given an eigenvector vj of Sp and its rotation vj’ = Rvj: R is rotation matrix • Multiply both sides by s2R, and manipulate: • So, • Eigenvectors are rotated eigenvectors • Eigenvalues are multiplied by the square of the scale j
The process • compute similarity transformation that best aligns the first and second moments • Assume the 2nd moments (eigenvalues) are distinct • Procedure: • Center the data in each coordinate system • Compute the scatter matrices and their eigenvalues and eigenvectors • Using this, compute • Scaling and rotation • Then, translation
Rotation • The rotation matrix should align the eigenvectors in order: • Manipulating: • As a result:
Scale • Ratios of corresponding eigenvalues should determine the scale: • Taking the derivative with respect to s2, which we are treating at • Setting the result to 0 and solving yields
Translation • Once we have the rotation and scale we can compute the translation based on the centers of mass:
Summary • Calculations are straightforward, non-iterative and do not require correspondences: • Moments, first • Rotation and scale separately • Translation • Assumes the viewpoints of the two data sets coincide approximately • Can fail miserably for significantly differing viewpoints