Download
1 / 19
190 likes | 305 Views
Control and user-interface of mobile DSP unit . ECE 345 Presentation Project 21. Eric Santa Dan O’Brien. Introduction. Expand functionality of mobile DSP unit Mechanical design completed by Dan Block Monitor operating parameters Create a GUI to assist in vehicle control

E N D
Control and user-interface of mobile DSP unit ECE 345 Presentation Project 21 Eric Santa Dan O’Brien
Introduction • Expand functionality of mobile DSP unit • Mechanical design completed by Dan Block • Monitor operating parameters • Create a GUI to assist in vehicle control • Provide end user with video feedback • Allow wireless, remote control of vehicle • Working in collaboration with Group 32 • Integrate their wireless data link
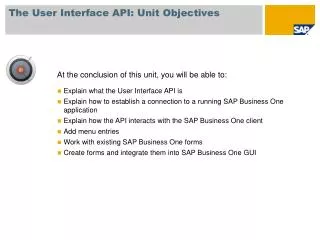
Objective • Benefits • Remote exploration of hazardous conditions • Remote visual data collection • Features • Easy to use GUI • Belt drive wheel system for greater maneuverability • 2-axis joystick with hat switch for vehicle and camera motion • 2-axis camera neck for complete view of surroundings
Original Design Review • Wireless camera • GUI development • Video • Motion control • Status feedback • Camera pan/tilt mechanism (neck) • Add hardware component • Neck position feedback
Camera Selection • Project is compatible with two wireless cameras • D-Link • 802.11 wireless transmission at 11Mbps • View image through java enabled web browser • Color video stream ~20fps • X-10 • Capture still shots with National Instruments frame grabber card • Black and white image
Project Build • Part Selection • GUI Layout and Features • GUI I/O Components • Neck Design and Build • Feedback Circuit Design and Build • Team 21 and 32 integration
Functional Design • JoystickDrive Motor Control
Functional Design • Potentiometer Position Feedback
Functional Design • Potentiometer Position Feedback
Performance • Potentiometer Position Feedback
Functional Design • Camera Pan/Tilt Head (“Neck”)
Successes • Completely integrated project • DirectX® Implementation (Joystick) • Wireless Camera Interface • 802.11b (present configuration) • X10™ (contingent configuration) • Visual Basic GUI Authoring • Mechanical Design and Development • Electromechanical feedback for camera
Challenges • Analog joystick hysteresis • Response time (>500 ms) • Limited range without LOS
Recommendations • Integrate with wireless LAN • Proximity sensors • Autonomous operation • Power management • Add robotic manipulator • Add off-road shock/wheel assembly
Summary • Open design environment • System Engineering and Integration • Software intensive • Simple, useful hardware components • Future lab project for GE 330