Download
1 / 23
240 likes | 432 Views
ChE / MET 433. 4 Apr 12. Feedback Controller Tuning: (General Approaches). Simple criteria; i.e QAD via ZN I, t r , etc e asy, simple, do on existing process multiple solutions Time integral performance criteria ISE integral square error IAE integral absolute value error

E N D
ChE / MET 433 4 Apr 12
Feedback Controller Tuning: (General Approaches) • Simple criteria; i.e QAD via ZN I, tr, etc • easy, simple, do on existing process • multiple solutions • Time integral performance criteria • ISE integral square error • IAE integral absolute value error • ITAE integral time weighted average error • Semi-empirical rules • FOPDT (ZN II) • Cohen-Coon • ATV, or Autotuning • Trial and error • Rules of thumb
Trial and Error (field tuning)* • Select the tuning criterion for the control loop. • Apply filtering to the sensor reading • Determine if the control system is fast or slow responding. • For fast responding, field tune (trail-and-error) • For slow responding, apply ATV-based tuning • Turn off integral and derivative action. • Make initial estimate of Kc based on process knowledge. • Using setpoint changes, increase Kc until tuning criterion is met * J.B. Riggs, & M.N. Karim Chemical and Bio-Process Control, 3rd ed. (2006)
Trial and Error (field tuning)* • Decrease Kc by 10%. • Make initial estimate of tI (i.e.,tI=5tp). • Reduce tI until offset is eliminated • Check that proper amount of Kc and tI are used. * J.B. Riggs, & M.N. Karim Chemical and Bio-Process Control, 3rd ed. (2006)
tI Kcand I levels good? Kc
Feedback Controller Tuning: (General Approaches) • Simple criteria; i.e QAD via ZN I, tr, etc • easy, simple, do on existing process • multiple solutions • Time integral performance criteria • ISE integral square error • IAE integral absolute value error • ITAE integral time weighted average error • Semi-empirical rules • FOPDT (ZN II) • Cohen-Coon • ATV, or Autotuning • Trial and error • Rules of thumb
Rules of Thumb * • Flow Loops: typically PI controllers; PB ~ 150; • Level Loops: PI for tight control; P for multiple tanks in series; • Pressure Loops: can be fast or slow (like P control by controlling condenser) • Temperature Loops: typically moderately slow; typically might use PID controller; PB fairly low (depends on gains); integral time on order of process time constant, with faster process derivative time ~ ¼ the process time constant. ** * D.A.Coggan, ed., Fundamentals of Industrial Control, 2nd ed., ISA, NC (2005) ** W.L.Luyben, Process Modeling, Simulation and Control for Chemical Engineers, 2nd ed., McGraw-Hill (1990)
Feedback Controller Tuning: (General Approaches) • Simple criteria; i.e QAD via ZN I, tr, etc • easy, simple, do on existing process • multiple solutions • Time integral performance criteria • ISE integral square error • IAE integral absolute value error • ITAE integral time weighted average error • Semi-empirical rules • FOPDT (ZN II) • Cohen-Coon • ATV, or Autotuning • Trial and error • Rules of thumb
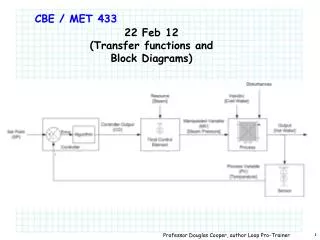
Feedback Control • Design • Disturbances: • Load • Setpoint • Questions: • Type of controller to use? • How select best adjustable parameters? • Performance criteria? • Guidelines: • Define performance. • Obtain “best” parameters, for • Select controller with “best” performance.
Controller with “best” performance. • P – only if can • PI – eliminate offset • PID – speed up response of sluggish systems • (T, comp, control; multi-capacity systems) Feed Back Control • PID controllers • Proportional: • Accelerates response • Offset • Integral: • Eliminates offset • Sluggish responses • If increase Kc, more oscillations -> unstable? • Derivative: • “Anticipates” future error • Stabilizing effect • Noise problem
Controllers: P-Only: P-I Controller: P-I-D Controller: Derivative (rate) time [=] time Chapter 5 ~ p 183
Derivative Action: P-I-D Controller: A A t t
Derivative Action: Another potential problem: noise A t
PID Derivative action: Advantages: • Reduces overshoot • Reduces oscillations • Recommended for slow/sluggish processes (speed up control) Disadvantages: • Susceptible to noise • Filtering (or averaging PV) introduces delay • 3rd tuning parameter
PID Control PID Tuning • Tune for PI • Derivative: • Add in D • Minimum response time • D initial = Tu/8 • Adjust Kc and I by same factor (%) • Check response has correct level of integral action PS: Try PID for HE process on Loop Pro Developer
Rules of Thumb * • Flow Loops: typically PI controllers; PB ~ 150; • Level Loops: PI for tight control; P for multiple tanks in series; • Pressure Loops: can be fast or slow (like P control by controlling condenser) • Temperature Loops: typically moderately slow; typically might use PID controller; PB fairly low (depends on gains); integral time on order of process time constant, with faster process derivative time ~ ¼ the process time constant. ** * D.A.Coggan, ed., Fundamentals of Industrial Control, 2nd ed., ISA, NC (2005) ** W.L.Luyben, Process Modeling, Simulation and Control for Chemical Engineers, 2nd ed., McGraw-Hill (1990)