Download
1 / 26
260 likes | 402 Views
Status of the Barrel Alignment – Comparision of 0T–3.8T movement to Survey. Bencze György, Béni Noémi , Szillási Zoltán , Ujvári Balázs. (ATOMKI, RMKI, University of Debrecen). (on behalf of the Barrel Alignment group). Muon Barrel Workshop, 2011.05.05.

E N D
Status of the Barrel Alignment – Comparision of 0T–3.8T movement to Survey Bencze György, Béni Noémi, Szillási Zoltán, Ujvári Balázs (ATOMKI, RMKI, University of Debrecen) (on behalf of the Barrel Alignment group) Muon Barrel Workshop, 2011.05.05. This project is supportedbytheHungarian National Research Fund (OTKA) No.: NK67974
Motivation: • We know from previous studies (see Barrel report on 2010 Aug Barrel WS) PG is recovered from Barrel reco at 0T • 3.8T PG is not possible We want to see whether relative movements are beliveable or not… Outline: • Presentation of the Survey results on target moving between 0T and 3.8T • Calculation of Survey targets’ drift from reconstructed MAB positions • Calculation of Survey targets’ drift from Z-bar measurements • Comparision of results
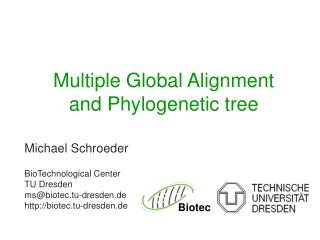
First order model for 0T 3.8T P’ P” P Assume no deformationsin Zglobal Objects (MABs, Z-bars) define planes. Plane movement can be fitted over object ΔZ.
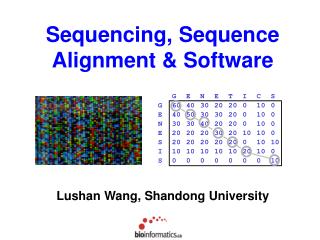
Z-bar measurements on YB±2 What camera observes: ‘Real’ life: Camera local X IP ZLED1 ZLED4 Camera local Y + ZLED2 ZLED5 ZLED1 ZLED4 + ZLED3 ZLED6 ZLED2 ZLED5 YB moves (with MAB) instead of Zfork(changes sign in φ, but not in Z due to an other trafo.) ZLED6 ZLED3 +φCMS on posZ side +φCMS on negZ side
Comparision Comparision of Survey results to the calculated Survey points Errors: Survey: ±0.5 mmMABs : ±800x√2/ √6 ~ ±0.5mm Z-bar : ~ ±0.5mm Z-bars and MABs are very much compatible with Survey (except passive MABs on YB ±1 Near
Conclusions • Comparision of relative movement of Survey targets to reco’d MABs and Z-bars done • Z-bars are in complete accordance to the Survey results • MABs are in accordance to Survey results • Analyis on chamber data is still to be done • ΔYglobal movements will be determined from chamber data • we are working on to constrain MAB/DT reco with Z-bars data (not easy, though!)