Download
1 / 25
250 likes | 338 Views
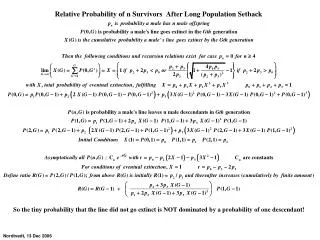
C-DIST : Distance Computation for Rigid and Articulated Models in Configuration Space. Liang-Jun Zhang Course Project, COMP 790-072 Dec 13, 2006. Distance Metric in Euclidean Space. Euclidean metric Manhattan metric L p Metric. q 1 =< x 1 ,y 1 , θ 1 >. q 0 =< x 0 ,y 0 , θ 0 >.

E N D
C-DIST: Distance Computation for Rigid and Articulated Models in Configuration Space Liang-Jun Zhang Course Project, COMP 790-072 Dec 13, 2006
Distance Metric in Euclidean Space • Euclidean metric • Manhattan metric • Lp Metric
q1=<x1,y1,θ1> q0=<x0,y0,θ0> Distance Metric in Configuration Space (C-space) ? Y Y θ A X X Configuration Space Workspace
milestone local path Motivation • Sampling Based Motion Planning • Only connect the nearest neighbor(s) • Evaluate the dispersion of samples • Measured by a distance metric • [Amato 00 et al], [Kuffner 04], [Plaku and Kavraki 06] PRM free space
A A B B Motivation • Penetration depth • Proximity query • Identify the easiest way to separate A from B • Measured by a distance metric
Challenge • Without rotational motion • Euclidean metric and Lp are directly applicable. • With rotational motion • Challenge to naturally combine the translational and rotational component
Previous Works • Model-independent • Distance metric on SE(3) • No bi-invariant metric exists • [Loncaric 85], [Park 95], [Tchon & Duleba 94] • Weighting rot. and trans. components • Left-invariant, [Park 95] • Model-dependent • Based on displacement vector • DISP [Latombe 91] , [LaValle 06] • Object Norm: [Kazerounian Rastegar 92] • Based on trajectory length • Generalized Distance Metric [Zhang 06] • Based swept volume • [Xavier 97], [Choset et al. 2005]
q1 A q0 DISP Metric [Latobme 91] [LaValle 06]
q0 q1 Properties A • Naturally combine the translational and rotational component • Need not any scalar • Invariant w.r.t to both body and world frames • Independent from the representation of the rotation • Rotation matrix, quaternion • Easily extended for articulated body
DISP Formulation Theorem: DISP can only be realized by the vertex on its convex hull. • Can be proved by screw motion • Largely simplify the computation • Enough to check the vertices on the convex hull V=311 V=3,024 T=1,008 q0 q1 q0 q1
DISP Computation V=3,024 T=1,008 V=311
DISP Computation Optimization • Walking on the convex hull • Accelerating using Bounding Volume Hierarchy (BVH) • Swept sphere volume (SSV)
Results (Demo) Triangle Soup
Applications • Sampling Based Motion Planning • Choose the nearest neighbours • Continuous Collision Detection • Replace the motion bound with displacement bound • Generalized Penetration Depth
Conclusion • A novel algorithm to compute DISP: C-DIST • Convex realization theorem • A straightforward theorem • Computation optimization • Walking on the convex hull • Accelerating using BVH • Extend for articulated models • Discuss the potential applications
Future Work • Geodesic in C-space under the DISP metric • Other useful metrics and properties in C-space • Area, Volume • Convexity
Outline • Previous Work • Definition • Formulation • Optimization • Extended for Articulated Bodies • Results • Applications
d θ Distance for an Object at Two Configurations θ d d + θ ? d + rθ ?
Sampling Based Motion Planning • K-nearest neighbors • How to quantify the ‘near’? • Use DISP metric
A Obstacle q(0) q(t) q(1) Continuous Collision Detection • If Separation Distance > Max Displacement, there is no collision.
Generalized Penetration Depth PDg The minimum DISP distance over all possible collision-free configurations A B Search for nearest collision-free configuration