Download
1 / 17
170 likes | 390 Views
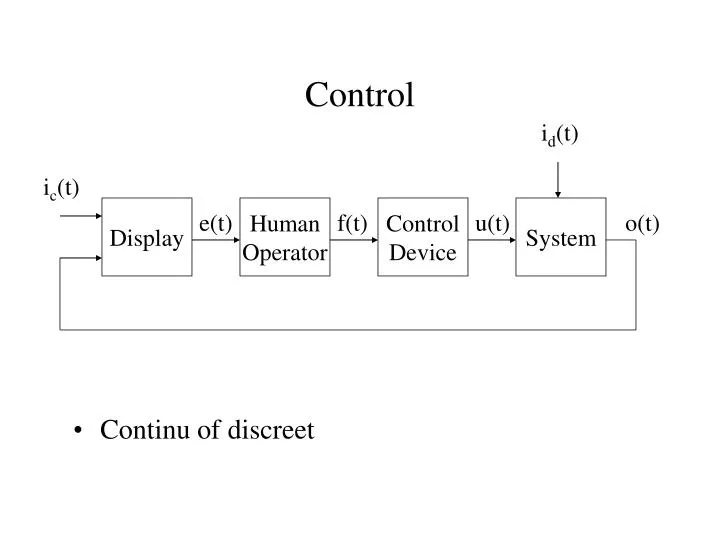
i d (t). i c (t). Display. Human Operator. Control Device. System. e(t). f(t). u(t). o(t). Control. Continu of discreet. Respons Selectie. Beslissingscomplexiteit logaritmisch verband tussen reactietijd en alternatieven Hick-Hyman law: RT = a + bLog 2 N empirisch gegeven

E N D
id(t) ic(t) Display Human Operator Control Device System e(t) f(t) u(t) o(t) Control • Continu of discreet
Respons Selectie • Beslissingscomplexiteit • logaritmisch verband tussen reactietijd en alternatieven • Hick-Hyman law: RT = a + bLog2N • empirisch gegeven • let op ‘decision complexity advantage’! N = 4 N = 12
Respons Selectie • Verwachting • geheugenaspecten • we nemen sneller informatie op die we verwachten en selecteren sneller acties die we verwachten • Compatibiliteit • overeenkomst locatie of beweging van control met mentaal model gebruiker • Snelheid vs. accuratesse • trade off snelheid en nauwkeurigheid • Feedback • systeemrespons op actie • samenvallen perceptie en actie in plaats en tijd
Control activatie • Twee basistypen feedback: • uitvoering van de handeling • resultaat van de handeling • Fysiek gevoel • ‘toggle’: visuele, auditieve en tactiele feedback • ‘touch screen’: mist tactiele feedback • Grootte • concurrentie tussen grootte en functionaliteit • Labeling • feedforward (vooral van belang voor niet-experts)
Positionering • Pointing • referentie naar specifiek object • direct (oftewel fysiek) • aanwijzen • symbolisch • Bewegingstijd • bewegen naar doel (Fitts’ law) • bewegen van het doel (indrukken, schuiven, etc.)
Fitts’ law • MT = a + b log2(2A/W) • MT: bewegingstijd naar het doel • A: afstand naar het doel • W: doorsnede van het doel • (2A/W): moeilijkheidsgraad (‘index of difficulty’) W1 A1 log2(2A1/W1) = 3 W1 A2 log2(2A2/W1) = 4 W2 A1 log2(2A1/W2) = 4
Device karakteristieken • Positie vs. snelheidsgecontroleerd • We hebben de volgende factoren: • locatie van de buttons en positie t.o.v. elkaar (richting) • locatie van de hand • richting van de snelheid van de cursor • richting van de snelheid van de hand
Device karakteristieken • directe positie controle • hand (of vinger) correspondeert met cursor (absolute “mapping”) • indirecte positie controle • oppervlak beweging hand is niet gelijk aan oppervlak beweging cursor (relatieve “mapping”) • indirecte snelheidscontrole • activatie in bepaalde richting geeft snelheid in die richting (bijv. joystick) • isotonisch: joystick beweegt vrij en blijft staan • isometrisch: krachtterugkoppeling en blijft staan • springloaded: krachtterugkoppeling, maar springt terug
Gain • Gain = (verandering cursor)/(verandering control) • meestal tussen 1.0 en 3.0 • lage gain veel moeite • hoge gain minder precies • alleen mogelijk bij indirecte control Hand Cursor
Effectiviteit I.h.a. zijn muis, touchscreen, en lichtpen goede devices voor positie controle (zie fig. 9.3, p. 267) Maar afhankelijk van: • Taak • indirect control bijv. moeilijker bij complexe taken, denk aan tekenen of schrijven maar ook trillen van hand of vingers • snelheid vs. precisie • Werkruimte • trade off grootte van de buttons en de werkruimte (relatie input device - display?) • Omgeving • problemen met trillingen en auditieve ruis
Verbale en symbolische input • toetsenbord of gesproken invoer • handschriftherkenning nog niet goed genoeg ontwikkeld • in principe grote uitdrukkingskracht (vergelijk met buttons)
Toetsenbord • Numerieke data • lineaire array • 1,2,3 (telefoon) vs. 7,8,9 (rekenmachine) • Linguïstische invoer • QWERTY • zowel mechanische als ergonomische overwegingen • gevestigde standaard • Dvorak toetsenbord • lay-out op basis van frequentie en volgorde van letters • efficiënter gebruik beide handen • toch weinig winst (5-10%) • Chording toetsenbord (bijv. velotype) • meerdere toetsen tegelijk • geen feedback op de toetsen
Gesproken invoer • voordelen: • grote functionaliteit • natuurlijk • dubbeltaken mogelijk • nadelen: • voornamelijk technische limitaties • gelimiteerde input • traag • achtergrondruis en vervorming van stem • continue control
Continue control en tracking • Volgen van continu veranderend doel (target) • autorijden, vliegenmeppen, computerspelletjes, temperatuur bij chemisch proces, etc. • Tracking: systeem output in overeenstemming brengen met variërende target • 2 display-types: • pursuit tracking display: cursor en target zijn onafhankelijk • compensatory tracking display: representatie van de afwijking • Problemen boven 1 Hz
Control volgorde • nulde-orde: positie (muis) • eerste-orde: snelheid (joystick) • tweede-orde: versnelling (vrijwel niet gebruikt) • Bij tweede-orde control grote problemen met traagheid en stabiliteit • moeilijk hanteerbaar, grote oscillaties • komt toch veel voor vanwege fysisch gedrag systemen • mogelijke oplossingen • predictieve displays • leerstrategieën • automatisering
Telerobotica • Een gevoel van telepresence (vgl. VE) • complexe perceptie - gebaseerd op vele factoren (medium, inhoud, gebruiker) • real-time interactiviteit van groot belang - vertraging (door bv. transmissie of complexiteit VE) bemoeilijkt controle & verlaagt telepresence • oplossingen: • lagere complexiteit van VE • predictieve displays • eerst simulatie v. beweging, dan uitvoeren • multimodaal: visueel/auditief/tactiel