Download
1 / 20
200 likes | 330 Views
Taxonomies of Multirobot Systems. Steve Marlowe. Merriam Webster.

E N D
Taxonomies of Multirobot Systems Steve Marlowe
Merriam Webster Pronunciation: tak-'sä-n&-mEFunction: nounEtymology: French taxonomie, from tax- + -nomie -nomyDate: circa 18281: the study of the general principles of scientific classification : SYSTEMATICS2: CLASSIFICATION; especially: orderly classification of plants and animals according to their presumed natural relationships- tax·o·nom·ic /"tak-s&-'nä-mik/ adjective- tax·o·nom·i·cal·ly /-mi-k(&-)lE/ adverb- tax·on·o·mist /tak-'sä-n&-mist/ noun
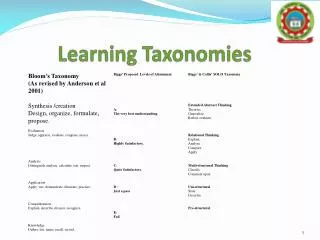
Importance • comparison • evaluate tradeoffs • defines issues • aids in generalizing
Sample Taxonomies • Decker • agent granularity • heterogeneity of agent knowledge • control distribution • communication methods • Cao et al. • group architecture • resource conflicts • origins of cooperation • learning • geometric problems
Dudek, Jenkin & Milios • communication • range • topology • bandwidth • size • composition • reconfigurability • processing ability
range none near infinite bandwidth infinite motion low zero topology broadcast address tree graph Dudek, Jenkin & Milios
size alone pair limited infinite composition identical homogeneous heterogeneous Dudek, Jenkin & Milios
reconfigurability static coordinated dynamic processing ability summation unit finite state automata push-down automata turing machine Dudek, Jenkin & Milios
Exploration using a Topological MapDudek et al. The collective operates by having individual robots start at a common location and then move independently to explore parts of the graph. Each robot has a unique marker which the robot can pick up/put down at its current location. The individual members meet on a pre-arranged schedule to merge their maps and subdivide the remaining territory.
communication range topology bandwidth size composition reconfigurability processing ability Exploration using a Topological MapDudek et al.
communication range topology bandwidth size composition reconfigurability processing ability near address infinite limited homogeneous cooperative turing machine Exploration using a Topological MapDudek et al.
Moving in FormationDudek et al. The collective operates in a leader-follower manner in which the leader robot signals its intention to the follower robot. The signaling is performed by the leader robot making specific motions prior to the intended motion which can be easily sensed by the followers.
communication range topology bandwidth size composition reconfigurability processing ability Moving in FormationDudek et al.
communication range topology bandwidth size composition reconfigurability processing ability near broadcast low limited heterogeneous cooperative turing machine Moving in FormationDudek et al.
Stone & Veloso • degree of heterogeneity • homogeneous • heterogeneous • degree of communication • non-communicating • communicating
environment goal Predator/Prey Domain
Homogeneous, Non-Communicating • reactive vs. deliberative • local vs global perspective • modeling other agents’ states • recursive modeling method • affecting others
Heterogeneous, Non-Communicating • benevolence vs. competitiveness • third most important issue • fixed vs learning agents • arms race • modeling other agents • roles
Homogeneous, Communicating • distributed sensing • communication content • bandwidth • topology • range
Heterogeneous, Communicating • understanding each other • planning communication • cost & freedom • negotiation • auctions • commitment/decommitment • collaborative localization