Download
1 / 13
130 likes | 257 Views
بسم الله الرحمن الرحيم Advanced Control Lecture three. PID Controllers 1- Action and types ( Smith & Corripio : Chapter 5 ) 2- Reset windup ( Smith & Corripio : Chapter 5 ) 3- Modifications ( Smith & Corripio : Chapter 5 and Astrom & Hagglund : Chapter 3 ). PID Control.

E N D
بسم الله الرحمن الرحيمAdvanced ControlLecture three PID Controllers 1- Action and types (Smith & Corripio: Chapter 5) 2- Reset windup (Smith & Corripio: Chapter 5) 3- Modifications (Smith & Corripio: Chapter 5 and Astrom & Hagglund: Chapter 3) Lecturer: M. A. Fanaei Ferdowsi University of Mashhad
PID Control Action of Controller: If the action is not correctly selected, the controller will not control • Reverse action (increase/decrease) In feedback control loop, the multiplication of Process gain (Kp), Control valve gain (Kv), Sensor gain (Km) and Controller gain (Kc) must be positive. Reverse action : If KpKv Km > 0 →Kc> 0
PID Control • Direct action (increase/increase) Direct action : If KpKv Km < 0 →Kc< 0 To determine the action of a controller, the engineer must know: The process characteristics The fail-safe action of the control valve
PID Control • Type of PID Controller • Classic PID: • Parallel PID: • Series PID: Range : 0.05 to 0.2 (0.1)
PID Control Reset Windup
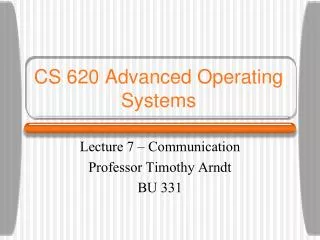
PID Control Reset Feedback (RFB) Mmax Mmin Mmax Mmin Internal Reset Feedback
PID Control Reset Feedback (RFB)
PID Control Reset Feedback (RFB) External Reset Feedback
PID Control Back Calculation Internal tracking signal Tracking Time Constant Td < Tt < Ti Back-Calculation with internal tracking
PID Control Back Calculation External tracking signal Back-Calculation with external tracking
PID Control Proportional and Derivative Kick Proportional Kick Derivative Kick Two Degrees of Freedom or ISA - PID Range: 0-1 Range: 0-1, Commonly zero