Download
1 / 10
100 likes | 228 Views
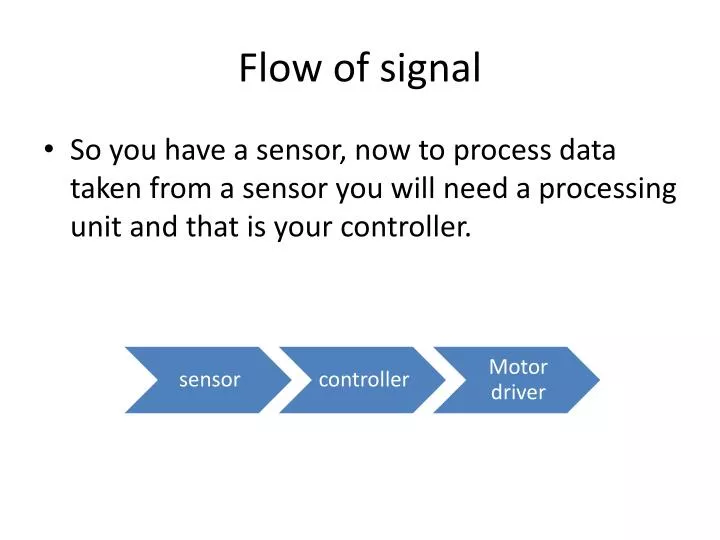
Flow of signal. So you have a sensor, now to process data taken from a sensor you will need a processing unit and that is your controller. What is Arduino ?.

E N D
Flow of signal • So you have a sensor, now to process data taken from a sensor you will need a processing unit and that is your controller.
What is Arduino? • In a simple language we can say that it is a programmable open source platform whose output can be changed according to different conditions of input. • It’s a 8-bit Atmel AVR microcontroller based development board.
Why Arduino? • Very easy to learn as syntax is similar to C • Open source software support • Ready to implement projects based on arduino are easily available • Inbuilt analog to digital converters are available • Large library support
Why Arduino? • Very easy to learn • Open source software support • Ready to implement projects based on arduino are easily available • Inbuilt analog to digital converters are available • Large library support
What are problems of basic code? • Used only 3 sensor • Rapid switching of motors may harm drivers • We don’t have control over radius of turn • Machine will run on zig-zag path that will reduce the speed drastically
PID Proportional- A high proportional gain results in a large change in the output for a given change in the error. If the proportional gain is too high, the system can become unstable .In contrast, a small gain results in a small output response to a large input error, and a less responsive or less sensitive controller. If the proportional gain is too low, the control action may be too small when responding to system disturbances.
PID Integral- The integral term accelerates the movement of the process towards setpoint and eliminates the residual steady-state error that occurs with a pure proportional controller. However, since the integral term responds to accumulated errors from the past, it can cause the present value to overshoot the setpoint value
PID Derivative- Derivative action predicts system behavior and thus improves settling time and stability of the system.Derivativeaction, however, is seldom used in practice.becauseof its inherent sensitivity to measurement noise.Ifthis noise is severe enough, the derivative action will be erratic and actually degrade control performance. Large, sudden changes in the measured error (which typically occur when the set point is changed) cause a sudden, large control action stemming from the derivative term, which goes under the name of derivative kick. This problem can be ameliorated to a degree if the measured error is passed through a linear low-pass filter or a nonlinear but simple median filter.