Download
1 / 14
140 likes | 339 Views
Weighted Matching-Algorithms, Hamiltonian Cycles and TSP. Graphs & Algorithms Lecture 6. TexPoint fonts used in EMF. Read the TexPoint manual before you delete this box.: A A A A A A A A A A A A. Weighted bipartite matching. Given: K n , n (complete bipartite graph on 2n vertices)

E N D
Weighted Matching-Algorithms, Hamiltonian Cycles and TSP Graphs & Algorithms Lecture 6 TexPoint fonts used in EMF. Read the TexPoint manual before you delete this box.: AAAAAAAAAAAA
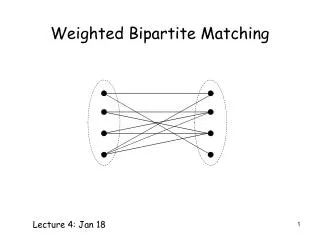
Weighted bipartite matching • Given: • Kn, n (complete bipartite graph on 2n vertices) • n£n weight matrix with entries wi, j¸ 0 • Want: perfectmatching M maximizing the total weight • Weighted cover (u, v): choice of vertex labelsu = u1,…,un and v = v1,…,vn , u, v2Rnsuch that, for all 1 ·i, j·n, we haveui + vj¸wi, j . • Cost c(u, v) := iui + vi .
Duality: max. weighted matching and min. weighted vertex cover • For any matching M and weighted cover (u, v) of a weighted bipartite graph, we havew(M) ·c(u, v) . • Also, w(M) = c(u, v) if and only if M consists of edges {i, j} such that ui + vj = wi, j. In this case, M and (u, v) are optimal. • Equality subgraph Gu, vof a fixed cover (u, v): • spanning subgraph of Kn, n, • {i, j} 2E(Gu, v) ,ui + vj = wi, j . • Idea: a perfect matching of Gu, v corresponds to a maximum weighted matching of Kn, n.
Correctness of the Hungarian Method TheoremThe Hungarian Algorithm finds a maximum weight matching and a minimum cost cover. Proof • The statement is true if the algorithm terminates. • Loop invariant: consider (u, v) before and (u', v') after the while loop • (u, v) is cover of G) (u', v') is a cover of G • c(u, v) ¸ c(u', v') + ¸w(M) • For rational weights, is bounded from below by an absolute constant. • In the presence of irrational weights, a more careful selection of the minimum vertex cover is necessary.
Hamiltonian Cycles • A graph on n vertices is Hamiltonian if it contains a simple cycle of length n. • The Hamiltonian-cycle problem is NP-complete (reduction to the vertex-cover problem). • The naïve algorithm has running time (n!) = (2n). • What are sufficient conditions for Hamiltonian graphs? Theorem (Dirac 1952)Every graph with n¸ 3 vertices and minimum degree at least n/2 has a Hamiltonian cycle.
x1 x2 x3 xi-1 xi xn Proof of Dirac’s Theorem (Pósa) • Suppose G is a graph with (G)n/2 that contains no Hamiltonian cycle. • Insert as many edges into G as possible Embedding of G into a saturated graph G’ that contains a Hamilton path • Neighbourhood (x1) yields n/2 forbidden neighbours for xnin {x1, …, xn – 2}. • Since xn cannot connect to itself, there is not enough space for all of its n/2 neighbours.
Weaker degree conditions • Let G be a graph on n vertices with degrees d1· … ·dn. • (d1, …, dn) is called the degree sequence • An integer sequence (a1, …, an) is Hamiltonian if every graph on n vertices with a pointwise greater degree sequence (d1, …, dn) is Hamiltonian. Theorem (Chvátal 1972) An integer sequence (a1, …, an) such that 0 ·a1· … ·an < n and n¸ 3 is Hamiltonian iff, for all i < n/2, we have: ai·i)an – i¸n – i.
Traveling Salesman Problem (TSP) • Given n cities and costs c(i, j) ¸ 0 for going from city i to city j (and vice versa). • Find a Hamiltonian cycle H*of minimum costc(H*) = e2 E(H*)c(e) . • Existence of a Hamiltonian cycle is a special case. • Brute force: n! = (nn + 1/2 e-n) time complexity • Better solutions: • polynomial time approximation algorithm for TSP with triangle inequality approximation ratio 2 • optimal solution with running time O(n22n)
Approximation algorithms • Consider a minimization problem. An algorithm ALG achieves approximation ratio (n) ¸ 1 if, for every problem instance P of size n, we haveALG(P) / OPT(P) ·(n) ,whereOPT(P) isthe optimal value of P. • An approximation scheme takes one additional parameter and achieves approximation ratio (1 + ) on every problem instance. • A polynomial time approximation (PTAS) scheme runs in polynomial time for every fixed ¸ 0. • The running time of a fully polynomial time approximation scheme (FPTAS) is also polynomial in -1.
2-approximation algorithm for TSP • Running time • Prim's algorithm with Fibonacci heaps: O(E + V logV) • Kruskal's algorithm: O(E logV)
An optimal TSP algorithm • For each Sµ {2,…,n} and k2S, defineP(S, k) ´ "minimum cost of a Hamiltonian path on Sstarting in 1 and ending in k" • Let V = {1,…,n} and positive costs c(i, j) be given.TSP = min{P(Vn{1}, k) + c(k, 1) : k2Vn{1}} • Recursive computation of P(S, k) :P({k}, k) = c(1, k)P(S, k) = min{P(Sn{k}, j) + c(j, k) : j2Sn{k}} • Compute P(S, k) buttom-up (dynamic programming) • Number of distinct P(S, k) values is (n – 1)2n – 2 . • Each time at most n operations are necessary.
More positive and negative results on TSP • Slight modifications yield a 1.5-approximation algorithm for TSP with -inequality. (Exercise) • Arora (1996) gave a PTAS for Euclidean TSP with running time nO(1/) . • For general TSP, there exists no polynomial time approximation algorithm with any constant approximation ratio ¸ 1, unless P = NP. (Exercise)