Download
1 / 27
270 likes | 439 Views
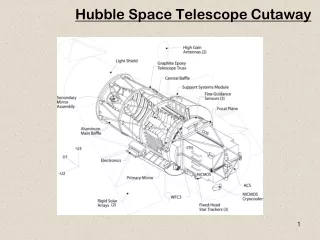
Robotic Augmentation of EVA for Hubble Space Telescope Servicing. David L. Akin Brian Roberts Kristin Pilotte Meghan Baker Space Systems Laboratory University of Maryland, College Park. Beam Assembly Teleoperator (c. 1984). HST EVA/Robotic Cooperation (1987).

E N D
Robotic Augmentation of EVAfor Hubble Space Telescope Servicing David L. AkinBrian RobertsKristin PilotteMeghan Baker Space Systems Laboratory University of Maryland,College Park
EVA Daily Average from SM1 Ranger Application to HST SM1
Grasp Analysis of SM-3B Numbers refer to instances of grasp type over five EVAsTotal discrete end effector types required ~8-10
Results of Robot Dexterity Analysis • Broke 63 crew-hrs of EVA activity on SM-3B into 1860 task primitives • 82.5% of task primitives are viable candidates for 2DOF robotic end effectors • 62.2% 1DOF tasks • 2.8% 2DOF tasks • 17.5% tasks performed differently by robot than EVA (e.g., torque settings) • 4.1% inherently dexterous tasks • 13.1% not yet categorized • All SM-3B robotic tasks can be performed by suite of 8-10 different end effectors
Baseline SM4 Task Allocations • RSUs (3) 3:00 • Battery Modules (2) 2:50 • COS 3:10 • WFC3 2:55 • ASCS/CPL 3:30 • FGS3 3:35 • NOBLs (3) 1:50 • ASCS/STIK 1:55 • DSC 1:00 • Setup & Closeout 5:00
Approaches to Ranger Operations • All scenarios assume Ranger dexterous manipulator(s) mounted on RMS throughout SM4 • Case 1: Single dexterous arm on modified MFR • Case 1A: Operates only during EVA in support of crew (“third hand”) • Case 1B: Operates only when EVA is not underway (conservative mode) • Case 1C: Operates with and without EVA crew • Case 2: Dual dexterous arms on RMS • Case 2A: Mounted on MFR; used only for EVA support • Case 2B: Mounted on MFR; used only outside of EVA • Case 2C: Mounted on MFR; used with and without EVA • Case 2D: Dedicated RMS mount; both EVA crew free-floating • Only Case 2C has been considered to date in any detail
HERCULES Hubble EVA/Robotic Cooperative Utility for Logistics and Experiment Servicing • Incorporates one or two dexterous Ranger manipulators onto RMS foot restraints • Obtains power/data/video through RMS electrical grapple fixture • Arms can be powered and used to release/engage launch latches (EVA not required for integration and operation) • Can be used stand-alone and as aid to EVA crew in foot restraints
EVA/Robot Teams - ready for prime time! • ~25% reduction in EVA time for HST battery servicing using simple low-dexterity robot (neutral buoyancy) • ~50% reduction in EVA time using Ranger on RMS to set up and close out work site; supply logistics to EVA crew (neutral buoyancy) • 40% reduction in EVA time on SM-1 (analysis) • 80% reduction in EVA time on SM-2 (analysis) • 70% reduction in EVA time on SM-3A (analysis) • ≥82.5% of tasks feasible for robot on SM-3B with ≤10 discrete end effectors (analysis) • 43% reduction in task time for SM-4 using HERCULES system • 70% of flight hardware for HERCULES manipulators in bonded storage at SSL (already bought and paid for!)
For More Information http://www.ssl.umd.eduhttp://ranger.ssl.umd.edu/data/