Download
1 / 49
560 likes | 887 Views
Feedback Controllers. Chapter 8. Chapter 8. Error Signal. Proportional Control. Chapter 8. Reverse or Direct Acting Controller. Direct-Acting (Kc < 0) : “output increases as input increases" Reverse-Acting (Kc > 0) : “output increases as input decreases". Chapter 8.

E N D
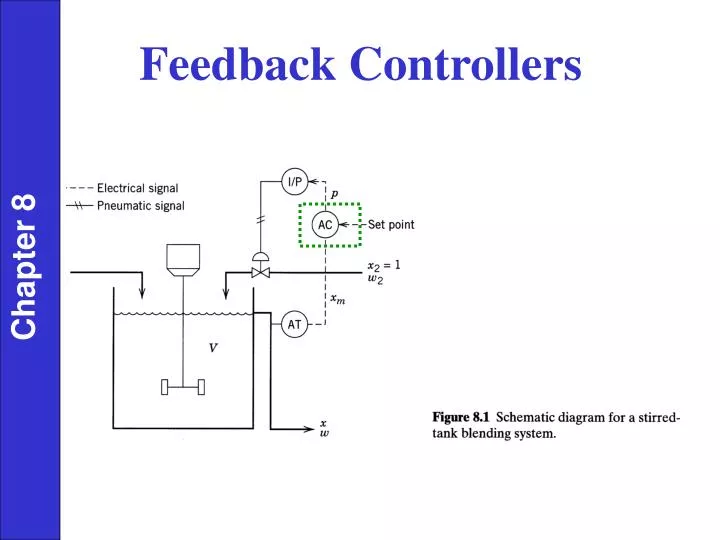
Feedback Controllers Chapter 8
Reverse or Direct Acting Controller • Direct-Acting (Kc < 0): “output increases as input increases" • Reverse-Acting(Kc > 0): “output increases as input decreases"
Proportional Band (PB) PB is the error (% of the range of controlled variable) required to move the output from its lowest to its highest value.
Example 2:Flow Control Loop Chapter 8 • Assume FT is direct-acting. • 1.) Air-to-open (fail close) valve ==> ? • 2.) Air-to-close (fail open) valve ==> ? • Consequences of wrong controller action??
Example 3:Liquid Level Control • Control valves are air-to-open • Level transmitters are direct acting Chapter 8 Question: Type of controller action?
INTEGRAL CONTROL ACTION Chapter 8
Reset Time Reset time is the time that the integral mode repeats the action of proportional mode.
Proportional-Integral-Derivative (PID) Control Now we consider the combination of the proportional, integral, and derivative control modes as a PID controller. • Many variations of PID control are used in practice (see Table 8.1, page 194) • Next, we consider the three most common forms.
Derivative and Proportional Kicks One disadvantage of the previous PID controllers is that a sudden change in set point (and hence the error, e) will cause the derivative term momentarily to become very large and thus provide a derivative kick to the final control element.
Elimination of Derivative and Proportional Kicks in Parallel-Form Controllers
Typical Response of Feedback Control Systems • Consider response of a controlled system after a • sustained disturbance occurs (e.g., step change in • disturbance variable) Chapter 8
Automatic and Manual Control Modes • Automatic Mode • Controller output, p(t), depends on e(t), controller • constants, and type of controller used. • ( PI vs. PID etc.) • Manual Mode • Controller output, p(t), is adjusted manually. • Manual Mode is very useful when unusual conditions exist: • plant start-up • plant shut-down • emergencies • Percentage of controllers "on manual” ?? • (30% in 2001, Honeywell survey) Chapter 8
Digital PID Controller • where, • = the sampling period (the time between • successive samples of the controlled variable) • = controller output at the nth sampling • instant, n=1,2,… • = error at the nth sampling unit • velocity form - see Equation (8-19) • (pd)- incremental change Chapter 8
Controller Comparison P -Simplest controller to tune (Kc). -Offset with sustained disturbance or set point change. PI -More complicated to tune (Kc, I) . -Better performance than P -No offset -Most popular FB controller Chapter 8 PID -Most complicated to tune (Kc, I, D) . -Better performance than PI -No offset -Derivative action may be affected by noise
Summary of the Characteristics of the Most Commonly Used Controller Modes • 1. Two Position: • Inexpensive. • Extremely simple. • 2. Proportional: • Simple. • Inherently stable when properly tuned. • Easy to tune. • Experiences offset at steady state. • 3. Proportional plus integral: • No offset. • Better dynamic response than reset alone. • Possibilities exist for instability due to lag • introduced. Chapter 8
4. Proportional plus derivative: • Stable. • Less offset than proportional alone (use of • higher gain possible). • Reduces lags, i.e., more rapid response. • 5. Proportional plus reset plus rate: • Most complex • Rapid response • No offset. • Difficult to tune. • Best control if properly tuned. Chapter 8
On-off Controllers • Simple • Cheap • Used In residential heating and domestic refrigerators • Limited use in process control due to continuous cycling of controlled variable excessive wear on control valve. • Example 1: Temperature control of jacketed vessel. Chapter 8
On-Off Controllers Synonyms: “two-position” or “bang-bang” controllers. Chapter 8 Controller output has two possible values.
Practical case (dead band) Chapter 8






















