Download

1 / 14
140 likes | 234 Views
An Approximation of Generalized Arc-Consistency for Temporal CSPs Lin Xu and Berthe Y. Choueiry Constraint Systems Laboratory Department of Computer Science and Engineering University of Nebraska-Lincoln { lxu | choueiry }@cse.unl.edu. Outline. Temporal CSP Consistency algorithms

E N D
An Approximation of Generalized Arc-Consistency for Temporal CSPs Lin Xu and Berthe Y. Choueiry Constraint Systems Laboratory Department of Computer Science and Engineering University of Nebraska-Lincoln { lxu | choueiry }@cse.unl.edu
Outline • Temporal CSP • Consistency algorithms • For general CSPs: • Arc consistency: AC-1, AC-2, AC-3, AC-4, AC6, AC7, AC2001, AC3.1, …, GAC • For Temporal CSPs? AC
STP: example Tom has class at 8:00 a.m. Today, he gets up between 7:30 and 7:40 a.m. He prepares his breakfast (10-15 min). After breakfast (5-10 min), he goes to school by car (20-30 min). Will he be on time for class?
Temporal CSP TCSP: each edge is a disjunction of intervals Simple Temporal Problem Temporal CSP
Complexity of consistency • STP is in P • Floyd-Warshall algorithm all-pairs shortest path [Dean 85, Dechter et al. 91] • STP some-pairs shortest path [TIME 03] • TCSP is NP-hard • Backtrack search [Dechter et al. 91]
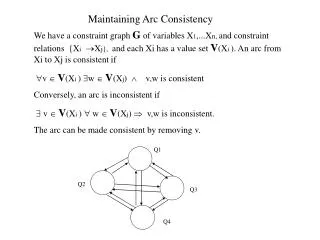
Filtering by arc-consistency • Arc-consistency • Given a constraint, updates the domain of connected variables • AC for TCSP • Single n-ary constraint • Generalized Arc-Consistency (GAC) is NP-hard
Approximating GAC • GAC • One global exponential-size constraint • AC • Works on existing triangles • Polynomial # of polynomial constraints
AC: how it works • Checks combinations of 3 intervals • [2, 5] composed with [1, 3] intersects with [3, 6] • [1, 3] composed with [3, 6] intersects with [2, 5] • [3, 6] composed with [2, 5] does not intersect with [1, 3] AC removes [1, 3], not supported, from domain of e3 • Updates the domains of variables, hence AC • Uses special, polynomial-size data structures • Supports, Supported-by
Experiments • New random generator for TCSPs • Guarantees 80% existence of a solution • Averages over 100 samples • Networks are not triangulated • Tests demonstrate filtering effectiveness when AC is used as a preprocessing step • Reducing the size of the meta-CSP (i.e., O(k|E|)) • Reducing effort for solving the TCSP • Number of constraint checks & CPU time
Advantages of AC • It is powerful, especially for dense TCSPs • It is sound, effective, and cheap O(n |E| k3) • It may be optimal • It uncovers a phase transition in TCSP • Integrated with BT search for TCSP • Last talk at the workshop, today • It should be tested as a look-ahead strategy