Download
1 / 142
1.43k likes | 1.79k Views
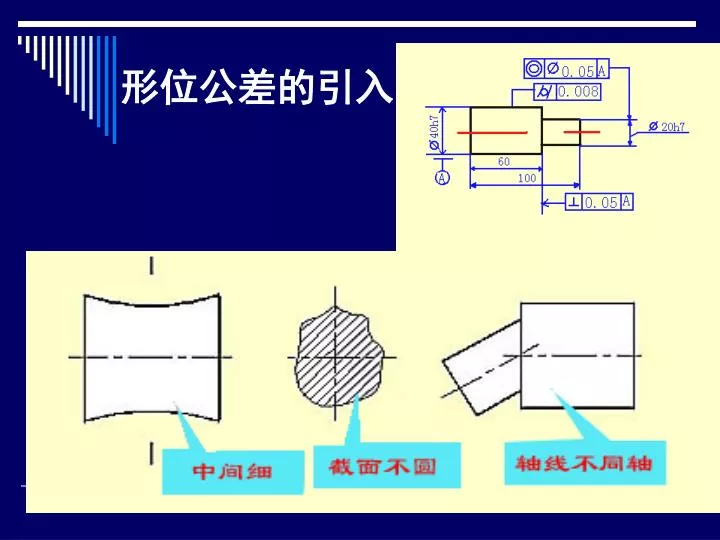
形位公差的引入. 第二章 形状和位置精度及互换性. 概述 形状误差及公差 位置误差及公差 形位公差与尺寸公差的关系 形状和位置精度的设计 形状和位置误差的测量. GB /T1182 -1996 通则定义和图样表示法 GB /T1184 -1996 未注的公差值. 74 年三个试行标准. GB 1182 -80 代号及其注法 GB 1183- 80 术语定义 GB 1184- 80 未注公差值. 公差制. 检 验 制. GB1958-80 检测规定. 配套的相关检测标准:( ISO 12780). GB/T 4249《 公差原则 》

E N D
第二章 形状和位置精度及互换性 • 概述 • 形状误差及公差 • 位置误差及公差 • 形位公差与尺寸公差的关系 • 形状和位置精度的设计 • 形状和位置误差的测量
GB/T1182 -1996 通则定义和图样表示法 GB/T1184 -1996 未注的公差值 74年三个试行标准 GB 1182-80 代号及其注法 GB 1183-80 术语定义 GB 1184-80 未注公差值 公差制 检 验 制 GB1958-80 检测规定 配套的相关检测标准:(ISO 12780) GB/T 4249《公差原则》 GB/T16671《最大实体要求、最小实体要求和可逆要求》 与尺寸公差的关系 §2.1概述 • 形位公差标准的发展简史
一、形位公差的基本术语及定义 • 形位公差的研究对象是:要素(Feature) 1、要素 (1)定义: 构成零件几何特征的点、线、面。 (2)分类 按存在状态:理想要素与实际要素 按所处地位:被测要素与基准要素 按功能关系:单一要素与关联要素 按几何特征:轮廓要素与中心要素
实际要素与理想要素 • 理想要素: 具有几何学意义的点、线、面。 • 实际要素: 零件上实际存在的要素。
被测要素与基准要素 • 被测要素 给出了形状和(或)位置公差要求的要素。 • 基准要素 用来确定被测要素方向或(和)位置的要素。
单一要素与关联要素 • 单一要素 对其自身提出形状公差要求的要素。 • 关联要素 对基准要素有功能关系要求的要素。
工件的替代 工件 (无限个点) 图样表达 提取(有限个点) 拟合 实际要素 提取的组成要素 拟合组成要素 公称组成要素 拟合导出要素 公称导出要素 提取导出要素 几何要素——基本术语、定义
一、形位公差的基本术语及定义(续) 2、形状公差 单一实际要素的形状所允许的变动全量。 如线?面?圆?圆柱?等,相应的形状公差项目有:直线度、平面度、圆度、圆柱度等。 3、位置公差 关联实际要素的方向或位置对基准所允许的变动全量,包括定向公差、定位公差、跳动公差。 4、形状和位置公差带 四要素是:形状、大小、方向、位置。 5、理论正确尺寸 确定被测要素的理想形状、理想方向或理想位置的尺寸。
0.010 20±0.1 20.1 形位公差带的位置 • 浮动公差带 • 固定公差带
理论正确尺寸 • 该尺寸不附带公差 • 标注在方框中 • 该尺寸单独使用没有意义,必须和相应的形位公差项目联合使用。
h1 h2 h3 §2.2形状误差及公差 一、形状误差及其评定原则 1、形状误差 被测实际要素对其理想要素的变动量。该理想要素的位置应符合最小条件。 何谓最小条件?为什么要引入最小条件? 2、最小条件 被测实际要素相对于理想要素的最大变动量为最小。 h1>h2>h3,h3为最小。 h3值则为实际直线的误差值。
最小条件(续) • 评定形状误差时,形状误差数值的大小可用最小包容区域的宽度或直径表示。 • 最小包容区 指包容被测实际要素时,具有最小宽度f或直径φf。 • 按照最小区域法评定的形状误差值是唯一的、最小的,可以最大限度地保证合格件通过。 • 实际测量中,并非必须按最小条件评定形状误差。
二、形状公差Tolerance of form • 形状公差的特点 • 单一要素对其理想要素允许的变动量。无基准。 • 公差带随实际尺寸的理想位置浮动。
直线度公差用于控制直线和轴线的形状误差,根据零件的功能要求,直线度可以分为:直线度公差用于控制直线和轴线的形状误差,根据零件的功能要求,直线度可以分为: 在给定平面内的直线度 在给定方向内的直线度 任意方向上的直线度 1、直线度Straightness
在给定平面内的直线度 其公差带是距离为公差值t的两平行直线之间的区域。 如图所示: 圆柱表面上任一素线必须位于轴向平面内,且距离为公差值0.02mm的两平行直线之间。
在给定方向上的直线度 公差带是距离为t的两个平行平面之间的区域。 如图所示: 零件的轮廓线必须位于箭头所指方向且距离t为0.02mm的两平行平面之间。
任意方向上的直线度 • 任意方向上的直线度要求: 其公差带是直径为公差值Øt的圆柱面内的区域。 • 如图所示, ød圆柱体的轴线必须位于直径为公差值0.04mm的圆柱体。 • 标准规定, 形位公差值前加注“ø”,表示其公差带为一圆柱体。
2、平面度Flatness • 平面度 是限制平面的形状误差。 • 公差带 是距离为公差值t的两平行平面之间的区域。 • 如图所示 表面必须位于距离为公差值0.1mm的两平行平面之间的区域内。
3、圆度Roundness • 圆度用于限制回转面正(径向)截面轮廓的形状误差。 • 公差带是是在同一正截面上且半径差为公差值t的两同心圆之间的区域:圆环。 需要强调:由于圆度项目控制的是径向截面轮廓的形状误差,框格箭头要严格地与尺寸线错开且要垂直于被测要素的轴线。
4、圆柱度 Cylindricity • 圆柱度用于限制圆柱表面的形状误差。公差带是半径差为公差值t的两同轴圆柱面之间的区域。 • 如图所示,实际圆柱表面必须位于半径差为公差值0.05mm的两同轴圆柱面之间。 • 被测要素是轮廓要素,公差带是圆筒而不是圆柱。 • 圆柱度的检测:目前只能采用近似的方法。
5、线轮廓度 profile any line • 轮廓度用于限制平面曲线或曲面截面轮廓的形状误差。 • 公差带是包络一系列直径为公差值t的圆的两包络线之间的区域,诸圆的圆心应位于理想轮廓线上。 • 如图所示,被测轮廓线必须位于包络一系列直径为公差值0.04mm且圆心位于理想轮廓线上圆的两包络线之间。 • 线轮廓度分无基准要求和有基准要求。有基准要求的线轮廓度属于位置公差的要求。
6、面轮廓度profile any surfaces • 面轮廓度用于限制曲面的形状误差。 • 公差带是包络一系列直径为公差值t的球的两包络面之间的区域,诸球的球心应位于理想轮廓面上。 • 如图所示,被测轮廓面必须位于包络一系列直径为公差值0.02mm且球心位于理想轮廓面上球的两包络线之间。 • 面轮廓度也分无基准要求和有基准要求。有基准要求的属于位置公差要求。
§2.3 位置误差及公差 (一)定向误差及其评定原则 (二)定向公差:平行度、垂直度、倾斜度 (三)定向误差的测量 一、定向公差Tolerances of orientation 二、定位公差Tolerances of location 三、跳动Tolerances of run-out (一)定位误差及其评定原则 (二)定位公差:同轴度、对称度、位置度 (三)定位误差的测量 (一)跳动 (二)跳动公差:圆跳动、全跳动 (三)跳动测量
B (一)、定向误差及其评定原则 1、定向误差 被测实际要素对其具有确定方向的理想要素的变动量。该理想要素的方向由基准确定。 2、评定原则:定向最小 在定向的前提下,包容被测要素到最小。
(二)定向公差 • 定义: 关联被测要素对基准要素在规定方向上允许的变动量。 • 项目有: 平行度、垂直度和倾斜度。 • 特点: 定向公差相对于基准有确定的方向,公差带的位置可以浮动; 定向公差具有综合控制被测要素的方向和形状的职能。
平行度(Parallelism ) • 当两要素要求互相平行时,用平行度公差来控制被测要素对基准的方向误差。 • 根据零件的功能要求,可分为: 给定方向上 任意方向上 • 根据被测要素与基准要素的关系,可分为: 面对面、面对线、线对线、线对面 • 相应的公差带形状包括: 两平行平面、圆柱面
0.1 A 0.1 A 给定方向上的平行度 公差带是距离为公差值t,且平行于基准平面(或直线或轴线)的两平行平面(或轴线)之间的区域。
任意方向上的平行度 • 公差带是直径为公差值t且平行于基准轴线的圆柱面内的区域。 • 如图所示,ød孔轴线必须位于直径公差值ø 0.1mm,且平行于基准轴线的圆柱面内。
线对面 面对面
垂直度Perpendicularity • 当两要素互相垂直时,用垂直度公差来控制被测要素对基准的方向误差。 • 根据零件的功能要求,可分为: 给定方向 任意方向 • 相应的公差带形状包括: 两平行平面 圆柱面
给定方向上的垂直度 • 公差带是距离为公差值t,且垂直于基准平面(或直径、轴线)的两平行平面(或直线)之间的区域。
任意方向上的垂直度 • 公差带是直径为公差值t,且垂直于基准平面的圆柱面内的区域。 • 如图所示,ød孔轴线必须位于直径公差值ø 0.05mm,且平行于基准平面的圆柱面内。
倾斜度 Angularity • 当两要素在0°~90°之间的某一角度时,用倾斜度要求。 • 用倾斜度要求时,图样上被测要素的理想方向由理论正确角度确定 。 • 倾斜度也可分为: 给定方向上 任意方向上
给定方向上的倾斜度 • 公差带是距离为公差值t,且与基准平面(或直线、轴线)成理论正确角度的两平行平面(或直线) 之间的区域。
任意方向上的倾斜度 • 公差带是直径为公差值t,且与基准平面成理论正确角度的圆柱面内的区域。 • 如图所示,øD孔轴线必须位于直径公差值0.05mm,且与A基准平面成45°角,平行于B基准平面的圆柱面内。
基准轴线 被测轴线 二、定位误差(一)、定位误差及其评定原则 1、定位误差 被测实际要素对其具有确定位置的理想要素的变动量。该理想要素的位置由基准和理论正确尺寸确定。 2、评定原则:定位最小 在定位的前提下,包容被测要素到最小。
(二)定位公差 • 定义: 关联实际要素对基准在位置上所允许的变动量。 • 项目有: 同轴度、对称度、位置度 。 • 特点: 定位公差带具有确定的位置,相对于基准的尺寸为理论正确尺寸; 定位公差带具有综合控制被测要素位置、方向和形状的功能。
同轴度 Coaxiality • 用于限制被测轴线对基准轴线的同轴位置要求。 • 公差带是直径为公差值t,且与基准轴线同轴的圆柱面内的区域。 • 标注特点 箭头对准尺寸线,基准粗横对准尺寸线。 • 基准特点 组合基准,作为一个基准使用。
对称度 Symmetry • 用于限制被测中心要素对基准中心要素的位置误差。 • 对称度分面对面、面对线、线对面、线对线等多种情况,公差带形状有两平行直线和两平行平面。 • 如图所示:面对面的对称度,公差带是距离为公差值t=0.1mm且相对基准中心要素对称配置的两平行平面之间的区域。
基准及其建立与体现 • 基准 Datums 是具有正确形状的理想要素,是确定要素间几何关系的依据,用以确定被测要素的方向和位置。 • 常见的基准形式: 单一基准Single datum 组合基准Combine datum 三基面体系Three-plane datum-system • 建立基准的基本原则: 符合最小条件 • 基准体现方法: 模拟法、直接法、分析法和目标法。
支承调整到等高 基准实际要素 模拟基准 基准体现方法—模拟法
0.1 A 0.1 A 单一基准
三基面体系和几何图框 三基面体系 • 由三个相互垂直的平面组成的基准体系。它们是确定和测量零件上各要素几何关系的起点。 • 在三基面体系中,按其三个基准平面在零件使用过程中的功能不同,可以将其划分:第一基准,第二基准,第三基准。 • 几何图框 • 用理论正确尺寸确定的一组理想要素之间,或理想要素组和基准之间的具有正确几何关系的图形。
位置度 Position • 用于限制被测要素对基准要素的位置要求,也可用于控制要素之间相对的位置关系。 • 根据被测要素不同,有点位置度、线位置度和面位置度。 • 公差带形状有圆、球、两平行直线、两平行平行平面及圆柱面。
复合位置度 • 由两个位置度联合控制孔组的位置。 • 如图所示: 4个Ø0.1的公差带相对于三基面体系而确定,是固定公差带,4个Ø0.05的公差带相对于基准A定向,是浮动公差带。孔的实际轴线必须位于Ø0.1和Ø0.05两公差带的重叠部分内。
