Download
1 / 28
280 likes | 389 Views
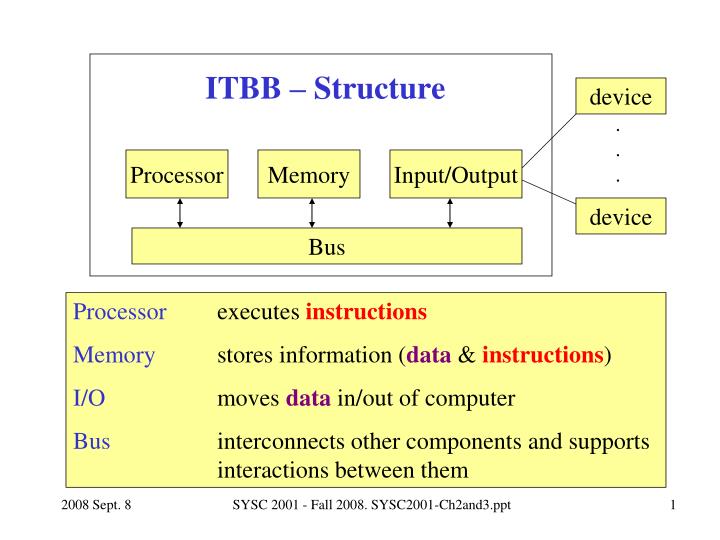
device. Processor. Memory. Input/Output. ITBB – Structure. device. Bus. Processor executes instructions Memory stores information ( data & instructions ) I/O moves data in/out of computer Bus interconnects other components and supports interactions between them.

E N D
device . . . Processor Memory Input/Output ITBB – Structure device Bus Processor executes instructions Memory stores information (data & instructions) I/O moves data in/out of computer Bus interconnects other components and supports interactions between them SYSC 2001 - Fall 2008. SYSC2001-Ch2and3.ppt
ITBB: Fundamental Binary Assumption • all information is binary encoded • result of transistor technology • one bit = one binary digit value either 0 or 1 • one Byte = 8 bits grouped together b7b6b5b4b3b2b1b0 e.g. 100111012 vs. 1001110110 • one word = machine dependent number of bits • information includes dataand instructions! case! msb lsb indicates base of number SYSC 2001 - Fall 2008. SYSC2001-Ch2and3.ppt
Encoding (Representing) Data Using Binary Values • counting numbers see Assignment 1 • integers (format defacto standard) • floating point (IEEE standard) • characters (ASCII, Unicode) • boolean • days of the week • colours • other ??? later – Ch. 9 later – assembly language application / implementation dependent ( SYSC 2003 ) SYSC 2001 - Fall 2008. SYSC2001-Ch2and3.ppt
Encoding (Representing) Instructions Using Binary Values • use some bits to encode operation opcode • use some bits to encode operands (if present) • for now, assume fixed number of bits ( w ) per instruction • fixed number of bits ( i ) used for opcode • fixed number of bits ( j ) used for operand(s) w bits opcode operands i bits j bits SYSC 2001 - Fall 2008. SYSC2001-Ch2and3.ppt
ITBB Function Function lecture 2 • Recall functions in a computer: • Data PROCESSING • Data STORAGE • Data MOVEMENT • CONTROL • now we consider each component in terms of these functions and the roles of the components in the structure SYSC 2001 - Fall 2008. SYSC2001-Ch2and3.ppt
Processor ( a.k.a. CPU) CPU = Central Processing Unit • PROCESSINGarithmetic and logic unit ( ALU ) • manipulates/changes/combines/calculates data values • STORAGEregisters hold values in CPU • each register has a unique name • CONTROLcontrol unit • built-in instruction cycle engine that drives machine • instruction cycle drives control to memory and I/O components when appropriate ! SYSC 2001 - Fall 2008. SYSC2001-Ch2and3.ppt
Processor Structure • MOVEMENT • internal connections (control unit, ALU and registers) • external Bus connections to other components CPU ALU Registers Control Unit external Bus connections internal connections SYSC 2001 - Fall 2008. SYSC2001-Ch2and3.ppt
Processor Instruction Cycle START cycle fetch instruction ( from memory ) execute the instruction may cause more memory accesses (for operands) HALT SYSC 2001 - Fall 2008. SYSC2001-Ch2and3.ppt
IMPORTANT SLIDE ! Memory ( 1 ) • STORAGE • fixed width locations (or cells) • each location contains information • contents: the value stored in the location • address: unique “name” for each location • MOVEMENT • internal connections • external bus connections e.g. house numbers memory does not differentiate contents as instructions vs. data ( its all just binary values ) SYSC 2001 - Fall 2008. SYSC2001-Ch2and3.ppt
Memory ( 2 ) • PROCESSING (limited processing compared to CPU) • refresh? transistor technology • bit-level error checking? error correction ? • CONTROL (of memory actions) • write – copy input value as new contents of a location • read – output (but do not modify) contents of a location • write / read driven from “outside” (e.g. processor, other ?) • may provide external control error condition? Ch. 5 later SYSC 2001 - Fall 2008. SYSC2001-Ch2and3.ppt
Memory Structure Memory memory processor locations Control Unit external Bus connections internal connections SYSC 2001 - Fall 2008. SYSC2001-Ch2and3.ppt
Input Output ( 1 ) • function depends on connected devices • STORAGE fixed width registers (or ports) • each register contains information • contents: the value stored in the register • address: unique “name” for each register • MOVEMENT • internal connections • external bus connections SYSC 2001 - Fall 2008. SYSC2001-Ch2and3.ppt
Input Output ( 2 ) Ch. 7 • PROCESSING • device dependent ! specialized hardware • CONTROL (of device-related processing) • write – copy input value as new contents of a port • read – output contents of a port • not always the case that can read & write a port ! • write / read driven from “outside” (e.g. processor, other) • may drive external control interrupts ! SYSC 2001 - Fall 2008. SYSC2001-Ch2and3.ppt
Input Output Structure N. B. I/O component = Memory ! device I/O device processor registers ( ports ) Control Unit external Bus connections internal connections SYSC 2001 - Fall 2008. SYSC2001-Ch2and3.ppt
Bus • pathway for interactions among components • standard signaling protocols for using the Bus • specified using timing diagrams • MOVEMENTYES! • CONTROL arbitration (traffic cop) • resolve concurrent requests to use the Bus • STORAGE not usually • PROCESSING not usually Appendix 3A sometimes … arbiter SYSC 2001 - Fall 2008. SYSC2001-Ch2and3.ppt
Interrupts • Mechanism to interrupt normal sequence of processing • Why? • I/O events: e.g. mouse click, network data arrives • timer: e.g. animation • program exception: e.g. overflow, division by zero • hardware error: e.g. memory error • these are asynchronous events! require programmed service • events caused by hardware, not software instructions Ch. 7.4 Unpredictable timing SYSC 2001 - Fall 2008. SYSC2001-Ch2and3.ppt
interrupt handler (a.k.a. ISR) “driver”? An Interrupt Scenario independent execution contexts “threads of control” App. code eg. audio CD Suppose App. code executing: • interrupt occurs • want ISR to run • then resume App. ISR = Interrupt Service Routine performs s/w action appropriate to interrupt event eg. editor want to share processor between threads! SYSC 2001 - Fall 2008. SYSC2001-Ch2and3.ppt
interrupt handler Transfer of Control via Interrupts App. code 5 2 interrupt occurs during execution of instruction at i 1 3 suspend thread ! hardware invokes interrupt handler resume thread @ i+1 6 4 SYSC 2001 - Fall 2008. SYSC2001-Ch2and3.ppt
Extending Instruction Cycle for Interrupts • after instruction execute phase of cycle – processor checks: • exception occurred? e.g. divide by 0 • interrupt event signal input to processor? • If interrupt pending: • Suspend and save context of current thread of execution • Set PC to start address of ISR • Continue Cycle fetch 1st instruction of ISR code • Eventually, ISR s/w restores context resume interrupted thread • If no interrupt pending: Continue Cycle fetch next instruction done by processor h/w – no s/w ! SYSC 2001 - Fall 2008. SYSC2001-Ch2and3.ppt
hmmmm….. last 3 slides all say the same thing Extending Processor Instruction Cycle START cycle no interrupt pending save context & set PC to start address of interrupt handler fetch instruction execute instruction yes HALT SYSC 2001 - Fall 2008. SYSC2001-Ch2and3.ppt
Signals: “here is the data”, “read the contents of this address”, “I want to use the bus”, etc. Digital Signaling • signals are indicated as voltage levels • use particular levels to represent binary values • e.g. +5 volts 1 0 volts 0 • change values “quickly” Or could be –5V, 0V or…? want to avoid reading when not stable signals stable 1 0 time SYSC 2001 - Fall 2008. SYSC2001-Ch2and3.ppt
App. 3A Signals and Timing Diagrams rising (leading) edge falling (trailing) edge ~ ~ • often bundle groups of related signals as one in a timing diagram e.g. 16-bit addresses 16 address signals one per bit 1 0 indefinite time elapsed signals stable, represent a useful 16-bit address signals may be stable, but do not represent a useful value 1 address 0 SYSC 2001 - Fall 2008. SYSC2001-Ch2and3.ppt
Bus • communication pathway connecting components • shared communications broadcast to all on bus • organize communicated information into 3 groups: • address • data • control of information being communicated everything else SYSC 2001 - Fall 2008. SYSC2001-Ch2and3.ppt
Data Bus • carries data • remember that there is no difference between “data” and “instruction” at this level • data bus width is a key determinant of performance • 8, 16, 32, 64 bit SYSC 2001 - Fall 2008. SYSC2001-Ch2and3.ppt
Address bus • identify the source or destination of data • e.g. CPU needs to read an instruction (data) from a given location in memory • address bus width determines maximum memory capacity of system (address space) • e.g. 8080 has 16 bit address bus giving 64k address space 216 SYSC 2001 - Fall 2008. SYSC2001-Ch2and3.ppt
Some Common Control Signals • reset – force all components to reset • clock(s) to synchronize communication • destination indicator – usually memory or I/O • acknowledgment from component – info received • interrupts • arbitration “hand shake” SYSC 2001 - Fall 2008. SYSC2001-Ch2and3.ppt
Bus Protocols • signaling and sequencing to permit interactions between components • processor puts address value on bus, and “memory read” control indication • memory receives read signal, reads address, gets appropriate data, puts data on bus • processor waits, then reads data from bus • May be • Synchronous - synchronized by a clock – organize protocol by clock “ticks” Ti • Asynchronous – no pacing by a shared clock e.g. memory read SYSC 2001 - Fall 2008. SYSC2001-Ch2and3.ppt
Single Bus Problems • lots of devices on one bus leads to: • propagation delays • long data paths mean that co-ordination of bus use can adversely affect performance • if aggregate data transfer approaches bus capacity • most systems use multiple buses to overcome these problems evolution for performance! SYSC 2001 - Fall 2008. SYSC2001-Ch2and3.ppt