Download
1 / 12
130 likes | 412 Views
Intro to Classical Mechanics Zita@evergreen.edu, 3.Oct.2002. Study of motion Space, time, mass Newton’s laws Vectors, derivatives Coordinate systems Force and momentum Energies. Four realms of physics. Mechanics = study of motion of objects in absolute space and time.

E N D
Intro to Classical MechanicsZita@evergreen.edu, 3.Oct.2002 • Study of motion • Space, time, mass • Newton’s laws • Vectors, derivatives • Coordinate systems • Force and momentum • Energies
Mechanics = study of motion of objects in absolute space and time Time and space are NOT absolute, but their interrelatedness shows up only at very high speeds, where moving objects contract and moving clocks run slow. Virtually all everyday (macroscopic, v<c) motions can be described very well with classical mechanics, even though Earth is not an inertial reference frame (its spin and orbital motions are forms of acceleration).
Space and time are defined via speed of light. • c ~ 3 x 108 m/s • meter = distance light travels in 1/(3 x 108) second • second is fit to match: period T = 1/frequency = 1/f E = hf = 2mB (hyperfine splitting in Cesium) second ~ 9 x 1010 TCs
Vectors and derivatives Practice differentiation vectors: #1.6 (p.36) A = ia t + jb t2 + kg t3
r y = r sin q q x = r cos q Polar coordinates r = der/dt = deq/dt = v = dr/dt = a = dv/dt =
Practice #1.22 (p.36) Ant’s motion on the surface of a ball of radius b is given by r=b, f = w t, q = p/2 [1 + 1/4 cos (4 w t)]. Find the velocity.
Newton’s Laws I. If F = 0, then v = constant II. SF = dp/dt = m a III. F12 = -F21 Momentum p = m v a = F/m = dv/dt v = a dt = dx/dt x = v dt
Practice #2.1, 2.2 Given a force F, find the resultant velocity v. For time-dependent forces, use a(t) = F(t)/m, v(t) = a(t) dt. For space-dependent forces, use F(x) = ma = m dv/dt where dv/dt = dv/dx * dx/dt = v dv/dx and show that v dv = 1/m F dx. 2.1(a) F(t) = F0 + c t 2.2(a) F(x) = F0 + k x
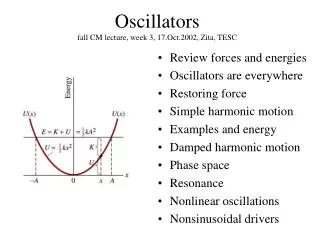
Energies F = m dv/dt = m v (dv/dx). Trick: d(v2)/dx = Show that F = mv ( ) = m/2 d(v2)/dx Define F = dT/dx where T = Kinetic energy. Then change in kinetic energy = F dx = work done. Define F = -dV/dx where V = Potential energy. Total mechanical energy E = T + V is conserved in the absence of friction or other dissipative forces.
Practice with energies To solve for the motion x(t), integrate v = dx/dt where T = 1/2 m v2 = E - V Note: x is real only if V < E turning points where V=E. #2.3: Find V = - F dx for forces in 2.1 and 2.2. Solve for v and find locations (x) of turning points.